EGNOS
 W
dniach 24-26 października 2005 uczestniczyłem w demonstracji europejskiego
programu GALILEO JOINT UNDERTAKING. Program realizowany jest w ramach szóstego
programu ramowego UE o nazwie ProDDAGE. Ogólnie mówiąc dotyczy on możliwości
praktycznego wykorzystania w nawigacji systemu EGNOS. Przy tej okazji chciałbym
czytelnikom przedstawić aktualny stan rozwoju europejskiego systemu GNSS
(Global Navigation Sattelite System) ze szczególnym uwzględnieniem systemu
EGNOS (European Geostationary Navigation Overlay Service). EGNOS jest
nawigacyjnym systemem wspomagania pracy obecnych systemów GPS i GLONASS. W
przyszłości oczywiście obejmie swym działaniem także system GALILEO. Jedną z
jego funkcji jest dystrybucja poprawek do tychże systemów celem zwiększenia dokładności
i wiarygodności określania pozycji. Obrazowo ujmując EGNOS (w części swoich
zadań) jest odpowiednikiem naziemnych systemów DGPS lub RTK.
W
dniach 24-26 października 2005 uczestniczyłem w demonstracji europejskiego
programu GALILEO JOINT UNDERTAKING. Program realizowany jest w ramach szóstego
programu ramowego UE o nazwie ProDDAGE. Ogólnie mówiąc dotyczy on możliwości
praktycznego wykorzystania w nawigacji systemu EGNOS. Przy tej okazji chciałbym
czytelnikom przedstawić aktualny stan rozwoju europejskiego systemu GNSS
(Global Navigation Sattelite System) ze szczególnym uwzględnieniem systemu
EGNOS (European Geostationary Navigation Overlay Service). EGNOS jest
nawigacyjnym systemem wspomagania pracy obecnych systemów GPS i GLONASS. W
przyszłości oczywiście obejmie swym działaniem także system GALILEO. Jedną z
jego funkcji jest dystrybucja poprawek do tychże systemów celem zwiększenia dokładności
i wiarygodności określania pozycji. Obrazowo ujmując EGNOS (w części swoich
zadań) jest odpowiednikiem naziemnych systemów DGPS lub RTK.
Jak powszechnie wiadomo państwa Unii Europejskiej zdecydowały się na budowę pierwszego, cywilnie kontrolowanego satelitarnego systemu nawigacyjnego o nazwie GALILEO (amerykański GPS oraz rosyjski GLONASS to systemy militarne). Przedsięwzięcie realizowane jest w dwóch kolejnych etapach nazwanych: GNSS1 oraz GNSS2. W fazie pierwszej budowany jest system EGNOS (równolegle w innych częściach globu ziemskiego powstają identyczne systemy: np. nad obszarem USA system WAAS (Wide Area Augmentation System) oraz MSAS (Multi-transport Satellite based Augmentation System) na dalekim wschodzie). Faza druga projektu to budowa właściwego systemu nawigacyjnego GALILEO [1].
W strukturze systemu EGNOS wyróżniamy cztery segmenty, kolejno:
- kosmiczny: w jego skład wchodzą trzy satelity geostacjonarne odpowiedzialne za przekazywanie poprawek do odbiorników naziemnych (Inmarsat III AOR-E, Inmarsat III IOR, Artemis (satelita telekomunikacyjny Europejskiej Agencji Kosmicznej) oraz konstelacje satelitów obecnych systemów GNSS. Obecny zasięg systemu przedstawiono na Rys. 1.
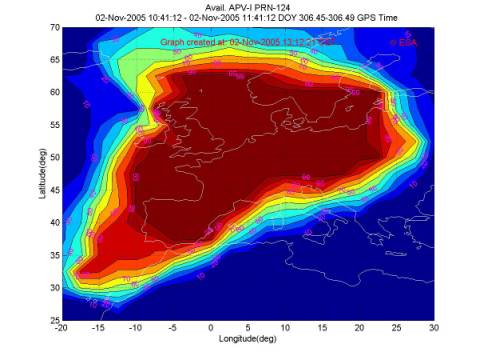
Rys.1. Zasięg systemu EGNOS w Europie w dniu 2 listopada 2005
(źródło: http://ravel.esrin.esa.it )
- naziemny: w jego skład wchodzą 34 stacje monitorujące RIMS (Ranging & Integrity Monitoring Stations (Rys.2.)). Jedna z takich stacji znajduje się Warszawie. Dodatkowo w skład segmentu wchodzi 6 stacji NLES (Navigation Land Earth Stations) oraz 4 stacje kontroli MCC (Mission Control Centres) (szczegółowy opis zadań poszczególnych grup stacji zamieszczono m.in. w [2] ),
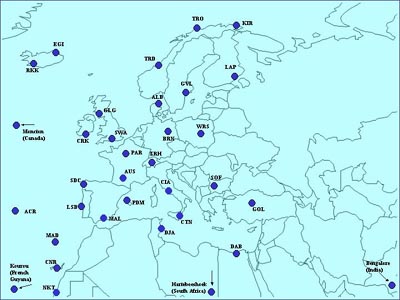
Rys. 2. Rozmieszczenie
stacji RIMS (źródło: www.esa.int)
- użytkowników: system został zaprojektowany dla wymagań stawianych głównie przez ICAO (International Civil Aviation Organization) dla lotnictwa cywilnego. Jednakże potencjalne grono użytkowników jest znacznie szersze i obejmuje wszelkie sektory działalności człowieka w których niezbędna jest duża dokładność pozycjonowania (transport morski, transport kolejowy, samochodowy itd.). Segment stanowią użytkownicy wyposażeni w odbiorniki odbierające sygnał od minimum dwu satelitów systemu EGNOS oraz przetwarzające dane jednego z następujących systemów: GEO, GPS lub GLONASS (w przyszłości GALILEO),
- infrastruktury: składa się z dwóch stacji ASQF (Application Specific Qualification Facility) oraz PACF (Performance Assessment and System Checkout Facility). Stacje (ośrodki) zajmują się m.in. wdrażaniem aplikacji, oceną jakości działania i archiwizacją danych całego systemu.
Wdrażanie systemu EGNOS do eksploatacji rozłożono na kilka etapów. Zaledwie przed trzema miesiącami zakończono z sukcesem fazę operacyjnego sprawdzenia gotowości systemu (ORR – Operational Readiness Review). Pozwoliła ona (po ośmiu latach intensywnych prac) zaakceptować system w następujących obszarach:
- funkcjonowania,
- stabilności i niezawodności w warunkach rzeczywistych,
- obsługi systemu,
- bezpieczeństwa.
Pozytywne wyniki akceptacji gotowości systemu pozwoliły rozpocząć w dniu 28 lipca 2005 fazę jego operacyjnej inicjacji. Jest ona realizowana przez European Satellite Service Provider (ESSA). Powyższa organizacja w dalszym etapie będzie zarządzała EGNOS-em. Dalej według planów w połowie 2006 roku system EGNOS oferował będzie pełny dostęp w czasie rzeczywistym do pomiarów stacji RIMS (funkcja: Open Service), a w lutym 2007 uzupełniony zostanie o część Safety of Live Services (m.in. transmisja alarmów wzywania pomocy). W tym momencie stanie się w pełni operacyjny.
W pracach badawczych prowadzonych w Europie czynny udział biorą jednostki polskie. Ich zadaniem jest uzyskanie rzeczywistych dokładności ESTB (EGNOS System Test Bed) na obrzeżach zasięgu systemu oraz ich porównanie z założeniami teoretycznymi. Eksperymenty morskie przeprowadził Urząd Morski w Gdyni wraz z tamtejszą Akademią Morską, badania lądowe przeprowadziła Katedra Geodezji Satelitarnej i Nawigacji UWM w Olsztynie, natomiast badania powietrzne przeprowadziła Wyższa Szkoła Sił Powietrznych w Dęblinie. Wyniki dokładności systemu były lepsze od spodziewanych [3]. Już teraz system EGNOS umożliwia określać pozycję w obszarze swego działania z dokładnością 1-2 metrów. Jednakże do czasu uzyskania statusu pełnej operacyjności (FOC – Full Operational Capability) należy używać go z rozwagą.
Janusz Uriasz
Dziękuję
za pomoc w pozyskaniu informacji zamieszczonych w niniejszym artykule panom:
Ashley Lyon, Business Development & Marketing Manager, European
Satellite Service Provider.
dr. inż. Adam Ciećko,
Katedra Geodezji Satelitarnej i Nawigacji UWM w Olsztynie.
Literatura:
1. Lamparski J., „GPS w geodezji”, Wydawnictwo GALL, Katowice 2003.