Directional error
Introduction
In
many theoretical considerations, as well as the navigation is necessary for
practical applications on the accuracy of linear objects based on accurate information
about their respective points. On the basis of knowledge (measurement) vector
of random parameters calculated scalar, as a component of these vectors. An
example is the calculation of the distance between two points whose coordinates
(two or more dimensions) are defined on the basis of measurement. We
also have a similar situation when the measured position coordinates define the
location of spatial objects line - isobath, the edge of the quay or the
fairway, a line restricting water body, distance to hazards, etc. In such
situations, we should use the error code, rather than the average circular
error.
Determining the dependence of error code (in the
direction specified by the angle a, X-axis) is as
follows:
![]()
Probability
corresponding directional error is equal to the average probability of error (P
= 0.683). Geometric
interpretation of the error code is illustrated in the drawing below
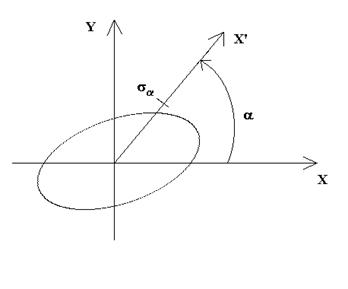
Fig. 1. Error in direction
Average error position equivalent
to M is given by the formula
![]()
Between the average error of
circular, elliptical semi axes average error and error code occur the following
inequality:
![]()
Task:
Calculate and plot the average position
error and error code in the function of the angle changes and the volatility of
0-360
Assuming that we define the position
of a navigation system for which:
sx=100 [m]
sy=25 [m]
sxy=1600 [m2]
The correlation coefficient calculated by the formula
