ELIPSOIDA ZIEMSKA I
PODSTAWOWE ZALEŻNOŚCI WYSTĘPUJĄCE NA JEJ POWIERZCHNI
1. Charakterystyka elipsoidy jako powierzchni odniesienia.
1.1. Parametry opisujące elipsoidę
1.2. Przekroje główne elipsoidy
1.5. Długość łuku równoleżnika.
2. Układy odniesienia i ich opis
2.1. Charakterystyka lokalnych układów odniesienia.
2.2.1.Układ północnoamerykański (NAD 27).
2.2.2 Układ europejski (ED 50).
2.2.6 Układ południowoamerykański (SAD).
2.2.8 Układ australijski (AND).
2.2.9 Układ argentyński (ARG).
2.2. Charakterystyka układów geocentrycznych.
1.
Charakterystyka elipsoidy jako powierzchni odniesienia.
Ziemia ma kształt spłaszczonej elipsoidy,
której półoś równikowa wynosi około 6373 km, półoś biegunowa około 6357 km.
Fizyczną powierzchnię Ziemi w 71% tworzy powierzchnia mórz i oceanów, zaś w 29% powierzchnia lądów, przy czym wzniesienia tych
ostatnich w stosunku do powierzchni oceanów mogą lokalnie osiągać kilka
kilometrów.
Teoretyczną powierzchnią Ziemi jest powierzchnia
geoidy, która pokrywa się z przedłużonym pod lądami średnim poziomem mórz i oceanów.
Na tej powierzchni wartość potencjału siły ciężkości jest stała i równa
potencjałowi na średnim poziomie mórz i oceanów. Ze względu jednak na
niejednorodność mas Ziemi i ich niejednorodne rozmieszczenie w jej wnętrzu,
powierzchnia geoidy ma kształt nieregularny (wzniesienia i zagłębienia) i nie
jest w każdym punkcie analityczna. Z tego też powodu powierzchnia ta nie może
być przyjęta za powierzchnię odniesienia stanowiącą jeden z elementów układu
odniesienia.
Najprostszą
bryłą matematyczną, najbardziej zbliżoną do kształtu geoidy jest elipsoida
obrotowa, czyli powierzchnia zamknięta, powstała w wyniku obrotu elipsy wokół
jednej z jej osi symetrii, w tym wypadku małej półosi.
Jednym z podstawowych zadań geodezji wyższej jest
ustalenie wymiarów elipsoidy ziemskiej najbardziej zbliżonej do kształtu Ziemi,
która spełniałaby następujące warunki:
·
Środek elipsoidy
powinien pokrywać się ze środkiem ciężkości Ziemi, a płaszczyzna jej równika z
płaszczyzną równika Ziemi,
·
Objętość elipsoidy
powinna być równa objętości geoidy,
·
Suma kwadratów odchyleń
geoidy od elipsoidy powinna być minimalna.
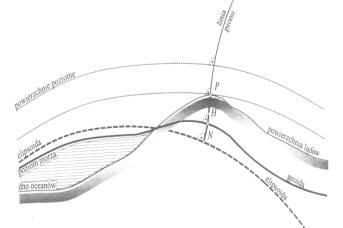
Rys. 1
Powierzchnia odniesienia: geoida i elipsoida.
1.1. Parametry opisujące elipsoidę
Elipsoidą
nazywamy powierzchnię o równaniu
kanonicznym:
![]()
Rys. 2 Elipsoida.
Liczby a, b, c
nazywamy półosiami elipsoidy
Jeśli półosie a i c
są sobie równe (a = c) to elipsoidę
nazywamy elipsoidą obrotową.
Rozmiary i kształt elipsoidy określają
następujące elementy:
a – duża półoś, zwana równikową,
b – mała półoś, zwana biegunową.
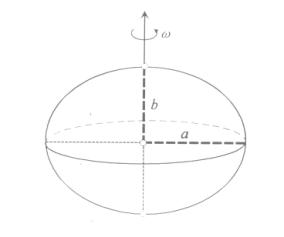
Rys. 3.
Elipsoida obrotowa.
W praktyce wykorzystuje
się również inne wielkości wyrażające wzajemny stosunek półosi, a zwłaszcza:
·
Biegunowe spłaszczenie
elipsoidy (f lub a)
![]() ,
,
gdzie:
f – biegunowe spłaszczenie elipsoidy,
a - duża półoś, zwana równikową,
b - mała półoś, zwana biegunową.
Niekiedy f nazywamy spłaszczeniem elipsy południkowej,
tzn. takiej, jaka powstaje w wyniku przekroju elipsoidy płaszczyzną zawierającą
małą półoś b.
·
Pierwszy mimośród
elipsoidy (e):
![]() ,
,
·
Drugi mimośród elipsoidy
(e’):
![]() ,
,
·
Można łatwo wykazać następujące,
ważniejsze związki pomiędzy parametrami elipsoidy obrotowej:
![]() ,
, ![]()
gdzie:
e -
pierwszy mimośród elipsoidy,
f
= 1 -![]() = 1-
= 1-![]() ,
,
(
1-e2 ) * ( 1+e’2 ) = 1,
e’2
=![]() , e2 =
, e2 =![]()
![]() ,
,
e2
= 2f – f2, e2 ![]() 2f,
2f,
gdzie:
f – biegunowe spłaszczenie elipsoidy,
a - duża półoś, zwana równikową,
b – mała półoś, zwana biegunową,
e2 - kwadrat pierwszego mimośrodu
elipsoidy,
e’2 – kwadrat drugiego mimośrodu elipsoidy.
Równanie
powierzchni elipsoidy obrotowej, wyrażone przez współrzędne prostokątne, podaje
się zazwyczaj w postaci:
![]()
![]() ,
,
gdzie:
x,
y, z – przestrzenne współrzędne prostokątne,
Wprowadziwszy oznaczenia:
![]() albo
albo ![]() ,
,
równanie elipsoidy zapisujemy również w postaci:
x2 + y2 +![]() z2 = a2.
z2 = a2.
Elipsoida obrotowa
jest określana przez dwa parametry, w tym przynajmniej przez jeden długościowy,
np. a i b lub przez półoś a i spłaszczenie a. Parametry te muszą mieć przyjęte wartości liczbowe,
które otrzymuje się na podstawie odpowiednich pomiarów geodezyjnych. Tak w
wyniku opracowania pomiarów wyznaczone zostały elipsoidy np. Everesta (1830
r.), Bessela (1841 r.), Clarke’a (1866 r.), Hayforda (1909 r.), Krasowskiego
(1940 r.) oraz wiele innych wcześniejszych i późniejszych elipsoid.
Na kongresie Unii
Geodezyjno-Geograficznej w 1924 roku w Madrycie elipsoida Hayforda została
przyjęta jako międzynarodowa i zalecono ją do stosowania także w pracach o
charakterze globalnym. W działaniach o mniejszym zasięgu, na przykład w wielu
krajowych sieciach geodezyjnych nadal są używane już wcześniej przyjęte
elipsoidy.
W
roku 1940 zostały opublikowane w ZSRR parametry elipsoidy Krasowskiego, oparte
na bardzo obszernym własnym nowym materiale pomiarowym oraz na badaniach wielu
innych krajów europejskich i amerykańskich (USA, Kanada). Elipsoida
Krasowskiego w 1942 roku została przyjęta we wszystkich pracach geodezyjnych w
ZSRR. W Polsce i w innych krajach demokracji ludowej wprowadzono ją w 1956 roku
jako elipsoidę odniesienia. Wybór ten jest jedynie w pewnym sensie i w pewnych
granicach sprawą obojętną. Decydują o nim zwykle względy praktyczne, na
przykład przyjęcie elipsoidy w krajach sąsiednich. Należy jednak pamiętać, że
nawet wspomniana sytuacja nie musi prowadzić do jednolitych układów odniesienia
współrzędnych, gdyż te ostatnie związane są jeszcze z tzw. punktem przyłożenia
elipsoidy i z jej orientacją.
Wybrane parametry (a, b, 1/f, e2 –
odpowiednio duża i mała półoś, odwrotność biegunowego spłaszczenia, kwadrat
pierwszego mimośrodu) ośmiu najbardziej znanych elipsoid odniesienia
przedstawiono w tabeli 1. Dla każdej z nich podano również te układy
odniesienia współrzędnych, w których dana elipsoida została przyjęta za
powierzchnię odniesienia.
Tabela 1. Parametry ellipsoid
|
Lp |
Nazwa i rok |
Duża półoś a |
Mała półoś b |
Odwrotność |
Kwadrat |
Układy odniesienia
współrzędnych |
|
określenia |
[ m ] |
[m ] |
biegunowego spłaszczenia 1/f |
Pierwszego mimośrodu e2 |
||
|
elipsoidy |
|
|
spłaszczenia 1/f |
mimośrodu e2 |
||
|
1 |
Everest –1830 |
6377276.345 |
6356075.413 |
300.802 |
0.00663785 |
IND |
|
2 |
Bessel – 1841 |
6377397.155 |
6356078.963 |
299.153 |
0.00667437 |
JAP |
|
3 |
Clarke – 1866 |
6378206.400 |
6356583.800 |
294.979 |
0.00676866 |
NAD 27 |
|
HAW |
||||||
|
4 |
Clarke zmodyfikowany – 1880 |
6378249.145 |
6356514.870 |
293.465 |
0.00680351 |
ARC |
|
5 |
Hayford –1909 |
6378388.000 |
6356911.946 |
297.000 |
0.00672267 |
EUR (ED-50) |
|
6 |
Krasowski –1940 |
6378245.000 |
6356863.019 |
298.300 |
0.00669342 |
URSS (‘42’) |
|
7 |
Międzynarodowa - 1967 |
6378160.000 |
6356774.719 |
298.250 |
0.00669454 |
AND |
|
8 |
Airy 1830. |
6377563.396 |
|
299.325 |
|
|
|
9 |
Modified Airy |
6377340.189 |
|
299.325 |
|
|
|
10 |
Australian National |
6378160.000 |
|
298.250 |
|
|
|
11 |
Bessel 1841 (Namibia) |
6377483.865 |
|
299.153 |
|
|
|
12 |
Bessel 1841 |
6377397.155 |
|
299.153 |
|
|
|
13 |
Clarke 1866. |
6378206.400 |
|
294.979 |
|
|
|
14 |
Clarke 1880. |
6378249.145 |
|
293.465 |
|
|
|
15 |
Everest (Sabah Sarawak) |
6377298.556 |
|
300.802 |
|
|
|
16 |
Everest (India 1956) |
6377301.243 |
|
300.802 |
|
|
|
17 |
Everest (Malaysia 1969) |
6377295.664 |
|
300.802 |
|
|
|
18 |
Everest (Malay. & Sing) |
6377304.063 |
|
300.802 |
|
|
|
19 |
Everest (Pakistan) |
6377309.613 |
|
300.802 |
|
|
|
20 |
Modified Fischer 1960 |
6378155.000 |
|
298.300 |
|
|
|
21 |
Helmert 1906 |
6378200.000 |
|
298.300 |
|
|
|
22 |
Hough 1960 |
6378270.000 |
|
297.000 |
|
|
|
23 |
Indonesian 1974 |
6378160.000 |
|
298.247 |
|
|
|
24 |
Hayford 1924 |
6378388.000 |
|
297.000 |
|
|
|
25 |
GRS 80 |
6378137.000 |
|
298.257 |
|
|
|
26 |
South American 1969 |
6378160.000 |
|
298.250 |
|
|
|
27 |
WGS - 72 |
6378135.000 |
6356750.520 |
298.260 |
0.00669432 |
WGS-72 |
|
28 |
WGS – 84 |
6378137.000 |
6356752.3142 |
298.257 |
0.00669438 |
WGS-84 |
1.2. Przekroje główne elipsoidy
W każdym
punkcie P powierzchni elipsoidy można poprowadzić prostą n prostopadłą
(normalną) do powierzchni. Nieskończenie wiele płaszczyzn zawierających
normalną n przecina powierzchnię elipsoidy w nieskończenie wielu krzywych
zbiegających się w punkcie P.
Płaszczyzny, które zawierają
w danym punkcie normalną n, która jest prostopadła do elipsoidy nazywamy
płaszczyznami normalnymi.
Natomiast przekrojami tej normalnej są krzywe uzyskane
na powierzchni elipsoidy w wyniku przecięcia jej płaszczyznami normalnymi,
zawierającymi normalną, w danym punkcie do elipsoidy. Wśród nieskończenie wielu
przekrojów normalnych elipsoidy wyróżnia się dwa przekroje główne, których
płaszczyzny normalne tworzą z sobą kąt prosty, a z otrzymanych krzywych na
powierzchni elipsoidy jedna ma krzywiznę największą a, druga zaś najmniejszą w
punkcie P. Jednym z przekrojów głównych jest przekrój prostopadły do południka,
zwany pierwszym wertykałem lub
przekrojem poprzecznym, a drugim przekrój
południkowy – krzywa uzyskana na powierzchni elipsoidy w wyniku przecięcia
jej płaszczyzną południkową.
Rys. 4. Przekroje główne elipsoidy w punkcie
Promień
krzywizny przekroju południkowego jest najmniejszy, a więc krzywizna jest
największa. Natomiast promień krzywizny pierwszego wertykału jest największy,
więc krzywizna jest najmniejsza.
Przekroje
normalne zawarte pomiędzy przekrojami głównymi mają krzywizny i promienie
pośrednie. Są to przekroje normalne dowolne.
Promień
krzywizny przekroju południkowego M wyrażony jest następującym wzorem:
Promień
równoleżnika z twierdzenia Meusniera: promień równoleżnika jest równy
iloczynowi promienia krzywizny tego przekroju poprzecznego i cosinusa
szerokości, jeżeli płaszczyzna przekroju poprzecznego i płaszczyzna
równoleżnika tworzą ze sobą kąt równy szerokości geodezyjnej i mają wspólną
styczną do równoleżnika w punkcie P
Rys. 5. Promień krzywizny przekroju południka
r=
Ncosφ
Promień równoleżnika
można wyliczyć w funkcji szerokości
stąd:
promień
krzywizny przekroju poprzecznego N wyrażamy zależnością:
W obu biegunach
promień krzywizny wszystkich przekrojów normalnych są sobie równe i wynoszą:
![]()
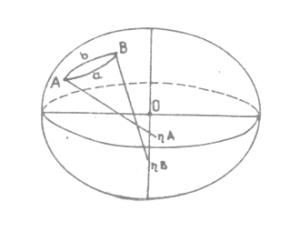
Rys. 6.
Wzajemne przekroje normalne w punktach A i B na powierzchni elipsoidy.
Przekrojem normalnym elipsoidy w punkcie A nazywa się taki
przekrój, którego płaszczyzna przechodzi przez normalną do punktu A. Jeżeli na
powierzchni elipsoidy występują dwa punkty: A oraz B, to ich wzajemne przekroje
normalne nie pokrywają się.
Płaszczyzna przekroju normalnego w
punkcie A przechodzi zwykle przez normalną punktu A oraz przez punkt B, ale
płaszczyzna ta nie zawiera na ogół normalnej do płaszczyzny w punkcie B z
wyjątkiem przypadku, gdy punkty te leżą na wspólnym południku lub równoleżniku.
Wzajemne przekroje normalne są
względem siebie „wichrowate”. Przekrój wprost w punkcie A, tj. łuk AaB nie
pokrywa się z przekrojem odwrotnym w tym punkcie, mianowicie z łukiem BbA.
Kąt między wzajemnymi przekrojami
normalnymi ![]() można obliczyć według
następującej zależności:
można obliczyć według
następującej zależności:
![]()
gdzie:
s –
odległość między punktami,
![]() - wartość radiana
wyrażona w sekundach,
- wartość radiana
wyrażona w sekundach,
![]() - średni promień
Ziemi.
- średni promień
Ziemi.
Promień
krzywizny przekroju normalnego można obliczyć z zależności:
![]()
gdzie:
![]() -azymut przekroju normalnego,
-azymut przekroju normalnego,
1.3.
Linia geodezyjna

Rys. 7
Przebieg linii geodezyjnej i przekrojów normalnych między dwoma punktami.
Linia
geodezyjna na danej powierzchni to taka krzywa, której płaszczyzna, ściśle
styczna w każdym jej punkcie, przechodzi przez normalną do powierzchni w tym
punkcie. Jest ona jednocześnie najkrótszą odległością między dwoma punktami na
powierzchni elipsoidy obrotowej. Ze względu na to taką linię geodezyjną określa
się jako ortodromę na powierzchni elipsoidy obrotowej.
Płaszczyznę
ściśle styczną do pewnej powierzchni stanowi płaszczyzna, która przechodzi
przez styczną do krzywej jak i przez inny punkt na niej, leżący nieskończenie
blisko punktu styczności.
Na
(rysunku 1.4.) zaprezentowano przebieg linii geodezyjnej między punktami A i B
oraz jej położenie w stosunku do przekrojów normalnych, tj.:
-
wprost krzywa AaB,
-
odwrotnie krzywa BbA.
Linia geodezyjna na powierzchni elipsoidy ( przy
azymutach nie zbliżonych do ![]() i
i ![]() ) dzieli kąt między wzajemnymi przekrojami normalnymi w przybliżeniu
w stosunku 1:2 i położona jest w danym punkcie bliżej przekroju normalnego
wprost. Kąt zawarty między linią geodezyjną łączącą punkty A i B a przekrojem
normalnym wprost w każdym z tych punktów (
) dzieli kąt między wzajemnymi przekrojami normalnymi w przybliżeniu
w stosunku 1:2 i położona jest w danym punkcie bliżej przekroju normalnego
wprost. Kąt zawarty między linią geodezyjną łączącą punkty A i B a przekrojem
normalnym wprost w każdym z tych punktów ( ![]() ), równy jest 1/3
kąta zawartego między przekrojem normalnym wprost a przekrojem odwrotnym w
danym punkcie, tj.:
), równy jest 1/3
kąta zawartego między przekrojem normalnym wprost a przekrojem odwrotnym w
danym punkcie, tj.:
![]()
![]() ,
,
gdzie:
![]() - kąt zawarty między przekrojem normalnym
wprost a przekrojem odwrotnym w danym punkcie,
- kąt zawarty między przekrojem normalnym
wprost a przekrojem odwrotnym w danym punkcie,
![]() - kąt zawarty
między linią geodezyjną a przekrojem normalnym wprost.
- kąt zawarty
między linią geodezyjną a przekrojem normalnym wprost.
![]()
Wartość kąta ![]() można obliczyć według
wzoru:
można obliczyć według
wzoru:
![]() ,
,
gdzie:
s –
odległość między punktami,
![]() - wartość radiana
wyrażona w sekundach,
- wartość radiana
wyrażona w sekundach,
![]() - średni promień
Ziemi,
- średni promień
Ziemi,
![]() - azymut
przekroju normalnego,
- azymut
przekroju normalnego,
e – pierwszy mimośród elipsoidy.
Linia geodezyjna jest najkrótszą odległością pomiędzy
dwoma punktami na powierzchni elipsoidy. Jej długość jest na pewno krótsza niż
długość łuku przekroju normalnego. W praktyce jednak długość przekroju
normalnego i linii geodezyjnej jest wartością bardzo małą i z reguły pomija się
nawet w bardzo dokładnych obliczeniach.
Różniczkę łuku linii geodezyjnej
przedstawiamy zależnością:
Ds
= ![]() ,
,
gdzie:
Ds
– różniczka łuku linii geodezyjnej,
M – promień krzywizny południka,
N – promień krzywizny pierwszego wertykału,
![]() - szerokość geograficzna,
- szerokość geograficzna,
![]() - długość
geograficzna.
- długość
geograficzna.
Natomiast
długość linii geodezyjnej określa następujące równanie:
S = ,
,
gdzie:
S –
długość linii geodezyjnej.
Twierdzenie Clairauta polegające na ukazaniu
możliwości wyznaczenia spłaszczenia geometrycznego f za pomocą wielkości czysto
dynamicznych: przyśpieszeń sił ciężkości określających f oraz parametru q
zależnego od prędkości wirowania Ziemi ![]() , wymiaru elipsoidy b lub a i masy Ziemi, ważne jest dla
dowolnej powierzchni obrotowej:
, wymiaru elipsoidy b lub a i masy Ziemi, ważne jest dla
dowolnej powierzchni obrotowej:
R =
a cos u,
gdzie:
R –
promień Ziemi,
a –
duża półoś elipsoidy,
u –
szerokość zredukowana.
Dlatego
też równanie powyższe można napisać w postaci;
a*cos
u*sinA = const.
Z wyrażenia a*cos u*sinA = const wynika, że dla linii
geodezyjnej na powierzchni elipsoidy obrotowej iloczyn cosinusa szerokości
zredukowanej punktu linii geodezyjnej i sinusa jej azymutu jest wielkością
stałą, to znaczy:
![]()
![]() .
.
Zależność ta pozwala na ogólną
analizę przebiegu ortodromy na powierzchni elipsoidy obrotowej. W punkcie W
(rys.5.) ortodroma osiąga największą szerokość zredukowaną (i geograficzną).
Punkt ten nazywa się wierzchołkiem ortodromy (linii geodezyjnej). W tym punkcie
azymut linii geodezyjnej jest równy![]() .
.
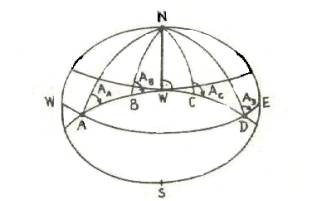
Rys. 8
Przebieg linii geodezyjnej na powierzchni elipsoidy obrotowej.
1.4. Długość łuku południka.
Długość
łuku południka między punktami o szerokościach ![]() wyraża się wzorem:
wyraża się wzorem:
 , [1]
, [1]
gdzie:
s – długość łuku południka,
M – promień krzywizny południka,
a – duża półoś elipsoidy,
e – pierwszy mimośród elipsoidy,
![]() - szerokość
geograficzna.
- szerokość
geograficzna.![]()
Całka ta
nie daje się rozwiązać w postaci elementarnej. Dlatego też funkcję podcałkową
należy rozwinąć w szereg Newtona, a następnie przeprowadzić całkowanie
poszczególnych wyrazów.
Ograniczając
się do wyrazów zawierających e6, rozwinięcie w szereg daje:
![]() ,
,
Parzyste
potęgi sinusów wchodzących w rozwinięcie ![]() zamienia się na
cosinusy parzystych łuków, zgodnie z równościami:
zamienia się na
cosinusy parzystych łuków, zgodnie z równościami:
![]()
![]()
![]() .
.
Wyrażenie
![]()
można więc przedstawić w postaci:

Wprowadzając oznaczenia:![]()
i wstawiając je do wzoru [1] otrzymamy:
 .
.
Po przeprowadzeniu całkowania otrzymamy:
 [2]
[2]
gdzie:
![]() wartość jednego
radiana wyrażona w tych samych jednostkach co i
wartość jednego
radiana wyrażona w tych samych jednostkach co i ![]() .
.
Wprowadza się
oznaczenia:
 [3]
[3]
Zależność
[2] służąca do obliczania długości łuku południka, z uwzględnieniem oznaczeń
[3], przyjmuje postać:
![]() [4]
[4]
gdzie:
s - długość łuku południka,
![]() - szerokość
geograficzna,
- szerokość
geograficzna,
![]() wartość jednego
radiana wyrażona w tych samych jednostkach co i
wartość jednego
radiana wyrażona w tych samych jednostkach co i ![]() .
.
Jeżeli
długość łuku południka liczy się od równika (![]() ), to wyrażenie [4] przyjmie postać:
), to wyrażenie [4] przyjmie postać:
![]() .
.
1.5. Długość łuku równoleżnika.
Równoleżnik na elipsoidzie obrotowej jest okręgiem
koła. Promień równoleżnika r, zgodnie z wzorami:
![]()
![]()
wynosi:
![]() ,
,
gdzie:
r – promień równoleżnika,
a – duża półoś elipsoidy,
e – pierwszy mimośród elipsoidy,
N – promień krzywizny pierwszego wertykału.
Obecnie istnieje
wiele elipsoid odniesienia oraz układów odniesienia. To ostatnie pojęcie jest
znacznie szersze od poprzedniego, gdyż obejmuje zarówno samą elipsoidę
odniesienia ( jej wymiary), jak i jej zorientowanie (punkt przyłożenia i
zorientowanie w bryle geoidy).
2. Układy odniesienia i ich opis
Układ współrzędnych jest pojęciem matematycznym,
abstrakcyjnym, a więc nie związanym z fizyczną powierzchnią ziemi. Wynika z
tego, że posługując się tak samo brzmiącymi nazwami układów współrzędnych
możemy określić różne wartości współrzędnych tego samego punktu. Spowodowane to
jest tym, że układy te mogą być względem siebie przesunięte i obrócone. Wynika
stąd wniosek, że mówiąc o konkretnym układzie współrzędnych należałoby go
związać z określonym ciałem fizycznym. Powoduje to potrzebę wprowadzenia
pojęcia układu odniesienia.
Układ odniesienia to konkretny układ współrzędnych, w ścisły sposób
związany z ciałem lub układem ciał fizycznych.
W praktyce
powiązanie to realizowane jest poprzez określenie współrzędnych pewnego
fizycznego punktu lub kilku punktów związanych z Ziemią (np. wybrany punkt na
powierzchni Ziemi) oraz orientacji układu współrzędnych.
W drugiej połowie lat osiemdziesiątych w różnych
państwach świata stosowano różne układy odniesienia (niekiedy nawet na terenie
jednego państwa). Doszło nawet i do tego, że wydawane przez daną instytucję
mapy nawigacyjne określonego rejonu opracowane były w zależności od skali w
różnych układach odniesienia. Sytuacja taka miała miejsce na przykład w wypadku
map Cieśniny Dover wydawanych przez Admiralicję Brytyjską, gdyż dla jednych z
nich układem odniesienia był układ Urzędu Pomiarowego Wielkiej Brytanii z 1936
roku, zaś dla innych układ europejski ED-50.
Obecnie stosowanych jest jeszcze wiele układów
odniesienia. Chociaż występują już tendencje do ich ujednolicania i przyjęcia
jednego, wspólnego globalnego układu odniesienia dla potrzeb geodezji i
nawigacji. Problem jest złożony i możliwy do realizacji dopiero współcześnie.
Stało się to dzięki rozwojowi geodezji i nawigacji satelitarnej. Zadanie
utworzenia układu odniesienia sprowadza się do wyboru układu współrzędnych,
jego odpowiedniej orientacji i powiązania z fizyczną bryłą Ziemi. Obecnie w
geodezji i nawigacji najczęściej stosowanym układem współrzędnych jest układ
współrzędnych geodezyjnych na elipsoidzie. Należy przy tym zauważyć, że
konkretna elipsoida odniesienia ma ściśle określone położenie i orientację
względem bryły Ziemi.
Określenie układu odniesienia pozwala na
prowadzenie w nim pomiarów współrzędnych dowolnych punktów. Istniejąca obecnie
duża ilość układów odniesienia wynika z dwóch zasadniczych przyczyn.
Najistotniejszą było prowadzenie w przeszłości, w poszczególnych państwach,
nieskoordynowanych wzajemnie prac badawczych, mających na celu utworzenie
lokalnych układów odniesienia. Nie mniej istotne są też względy wojskowe,
mające na celu utrudnienie potencjalnemu przeciwnikowi przygotowanie
szczegółowych map cudzego terytorium. Przy współczesnym rozwoju techniki,
szczególnie satelitarnej, ta druga przyczyna zaczęła tracić na znaczeniu.
Zwłaszcza, że stosowanie globalnych i dokładnych systemów nawigacyjnych wymaga
poprawnego określenia światowego układu odniesienia. Jednakże układy lokalne i
regionalne nie tracą przy tym całkowicie swojego znaczenia.
2.1.
Charakterystyka lokalnych układów odniesienia.
Zostały
stworzone celem jak najwierniejszego odwzorowania wybranego fragmentu
powierzchni Ziemi: rejon geograficzny, kontynent, teren danego państwa itp. Są
to układy, w których parametry przyjętej elipsoidy odniesienia zostały
wyznaczone najczęściej na podstawie pomiarów naziemnych, a zorientowanie owej
elipsoidy względem geoidy polegało na takim określeniu punktu przyłożenia, aby
powierzchnia elipsoidy, na objętym danym układem fragmencie powierzchni Ziemi,
była jak najbardziej zbliżona do powierzchni geoidy. Lokalne układy odniesienia
są układami quasi-geocentrycznymi, w których początek znajduje się w środku
przyjętej elipsoidy odniesienia. Do układów tych zaliczamy:
2.2.1.Układ północnoamerykański (NAD 27).
Układ ten jest stosowany na kontynencie północnoamerykańskim od Alaski po Meksyk i Amerykę Środkową z Wyspami Karaibskimi i Grenlandią. Oparty jest on o elipsoidę Clarke’a z 1866 roku zorientowaną wielopunktowo z punktem przyłożenia w Neades Ranch w stanie Kansas.
2.2.2 Układ europejski (ED 50).
Układ ten obejmuje część Europy, Afryki i Azji. Oparty jest o elipsoidę Hayforda z punktem przyłożenia w Poczdamie i zorientowaną wielopunktowo.
2.2.3 Układ indyjski (IND).
Obejmuje on terytorium Indii oraz państw sąsiednich. Utworzony w oparciu o elipsoidę Everesta z punktem przyłożenia w Kalianpur (Środkowe Indie). Elipsoida ta pochodzi z 1830 roku i jest jedna z najstarszych obecnie stosowanych elipsoid.
2.2.4 Układ japoński (JAP).
Oparty jest o elipsoidę Bessela z punktem przyłożenia w starym tokijskim obserwatorium astronomicznym. Zasięgiem swoim obejmuje Japonię oraz poprzez sieć triangulacyjną także terytorium Korei i sięga aż po Mandzurię.
2.2.5 Układ ‘42’ (URSS).
Obejmuje terytorium Rosji oraz sąsiednich państw byłego Związku Radzieckiego. Oparty jest o elipsoidę Krasowskiego, która została opracowana na podstawie obszernych badań obejmujących swoim zasięgiem znaczne obszary Europy, Azji oraz Ameryki Północnej. Dzięki temu jest ona jedna z najbliższych geoidzie elipsoid klasycznych. Zorientowano ją wielopunktowo z punktem przyłożenia w obserwatorium w Pułkowie koło Leningradu.
2.2.6 Układ południowoamerykański (SAD).
Oparty jest o elipsoidę Hayforda z punktem przyłożenia w La Canoa w Wenezueli. Swoim zasięgiem obejmuje tereny Ameryki Południowej.
2.2.7 Układ afrykański (ARC).
Obejmuje on obszar całej Afryki. Oparty jest o elipsoidę Clarke’a (1880r.) z punktem przyłożenia znajdującym się w Cape of Good Hope (Buffalafontein).
2.2.8 Układ australijski (AND).
Układ oparty jest o elipsoidę Nowa A.I.G. (1967r.) z punktem przyłożenia umieszczonym w Johnstown. Obejmuje on tereny Afryki.
2.2.9 Układ argentyński (ARG).
Obejmuje
tereny Argentyny. Oparty jest o elipsoidę Hayforda (1909r.), zorientowaną
wielopunktowo z punktem przyłożenia w Campo Inchauste.
2.2.10 Układ Hawajski (HAW).
Układ ten swoim zasięgiem obejmuje tereny hawajskie. Oparty jest o elipsoidę Clarke’a (1866r.), zorientowaną wielopunktowo z punktem przyłożenia znajdującym się w Diamand Head.
2.2.
Charakterystyka układów geocentrycznych.
Układy geocentryczne (globalne), stworzone celem jak najwierniejszego odwzorowania całej powierzchni Ziemi. Są to układy, w których parametry elipsoidy odniesienia zostały wyznaczone na podstawie pomiarów naziemnych (geodezyjnych, astronomicznych, grawimetrycznych) oraz wyników obserwacji sztucznych satelitów Ziemi, a zorientowanie elipsoidy względem geoidy polegało na takim określeniu punktu przyłożenia, by powierzchnia elipsoidy na całej powierzchni Ziemi była jak najbardziej zbliżona do powierzchni geoidy. Globalne układy odniesienia są układami geocentrycznymi, których początek znajduje się w środku masy Ziemi.
Rozwój geodezji satelitarnej oraz satelitarnych systemów nawigacyjnych stworzył potrzebę, a jednocześnie realną możliwość, opracowania światowego układu odniesienia. Pierwszym globalnym układem, w którym wykorzystano pomiary satelitarne, był WGS 60 (World Geodetic System). Potem kolejno opracowano: w 1967 roku WGS 66 i w 1975 roku – WGS 72. Natomiast od 1987 roku zaczęto wykorzystywać układ WGS 84. Równolegle stosowany jest także satelitarny układ odniesienia NWL 9D. Jednakże nie jest on wykorzystywany w nawigacji.
Wszystkie te globalne układy odniesienia obejmują swym zasięgiem obszar całego świata. Elipsoidą odniesienia jest elipsoida ziemska, natomiast punkt przyłożenia stanowi środek geoidy.