ESTYMACJA POZYCJI STATKU NA POWIERZCHNI KULI
1. Estymacja
pozycji z dwóch namiarów własnych.
2. Estymacja
pozycji z dwóch namiarów obcych.
3. Estymacja
pozycji z dwóch kątów poziomych.
4. Estymacja
pozycji z dwóch odległości.
5. Estymacja
pozycji z dwóch różnic odległości.
6. Estymacja
pozycji z dwóch sum odległości.
7. Estymacja
pozycji z namiaru własnego i odległości.
1. Estymacja pozycji z dwóch namiarów własnych.
Bezpośrednie obliczenie współrzędnych
pozycji statku z namiarów (radionamiarów), które wykonuje okręt na dwa znaki
nawigacyjne jest skomplikowane.
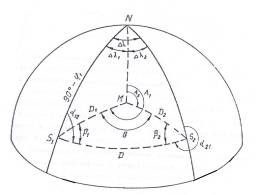
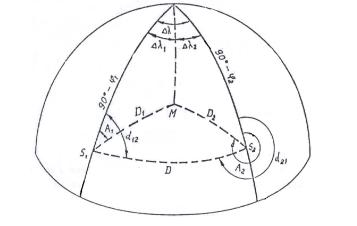
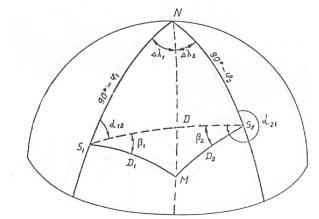
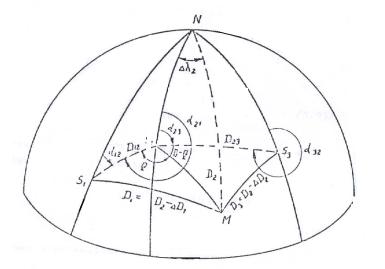
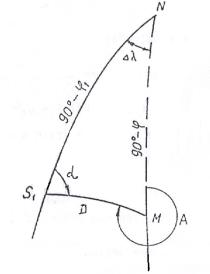
Rys. 1 Elementy geometryczne obliczania pozycji z dwóch namiarów własnych.
Wielkości znane to:
·
Namiary (ortodromiczne)
ze statku na znaki nawigacyjne
Nst1
= A1 i Nst2 = A2,
·
Współrzędne znaków
nawigacyjnych (najczęściej radiolatarni):
S1(![]() ),
S2(
),
S2(![]() ),
),
·
Kąt przecięcia się linii
pozycyjnych:
![]()
Wielkości szukane stanowią współrzędne
pozycji statku
![]()
Na podstawie wielkości znanych możemy
obliczyć wzajemne azymuty stacji (radiolatarni) oraz odległość między nimi D.
Mamy jednak zbyt mało danych aby wystarczyły do obliczenia współrzędnych
pozycji statku w punkcie M. Rozwiążemy układ równań aby uzyskać pomocniczą
wielkość. Wielkością tą mogą być kąty (![]() )
lub (
)
lub (![]() ),
),
![]() lub
lub ![]() albo odległości D1 lub D2.
Obliczając jedną z podanych wielkości i rozwiązując odpowiedni układ równań
powodujemy, że dalsze rozwiązanie zadania jest bardziej proste.
albo odległości D1 lub D2.
Obliczając jedną z podanych wielkości i rozwiązując odpowiedni układ równań
powodujemy, że dalsze rozwiązanie zadania jest bardziej proste.
Wybieramy układ równań:
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Wielkości znane w tym układzie równań
to:
![]()
oraz D, którą można obliczyć z trójkąta
S1NS2.
Wielkości nieznane to:
![]() .
.
Układ równań jest układem normalnym czterech
równań nieliniowych. Prowadząc kolejne eliminacje otrzymamy:
Przekształcając dalej otrzymamy równanie
algebraiczne ósmego stopnia postaci:
R*x8+S*x6+T*x4+U*x2-K2
= 0,
![]()
Współczynniki: R, S, T, U, K są to
wielkości stałe dla danej pary radiolatarń (ich współrzędnych) i zmierzonych
wartości radionamiarów.
Rozwiązanie
naszego zadania można zastąpić rozwiązaniem pośrednim i przybliżonym przez to
prostszym i krótszym, stosując metodę kolejnych przybliżeń. Polega to na
zmianie radionamiarów własnych na radionamiary obce przez wprowadzenie poprawki
na zbieżność południków. Wartości zbieżności południków należy obliczyć
przyjmując przybliżone wartości współrzędnych pozycji statku (współrzędne
pozycji zliczonej Mz (![]() )).
)).
Kolejność
obliczeń:
- Obliczamy wartość przybliżone zbieżności południków

- Obliczamy wartość radionamiarów obcych
- Obliczamy wartości wzajemnych azymutów radiolatarń
 oraz odległość między nimi D ze wzorów:
oraz odległość między nimi D ze wzorów:
![]()
![]()
![]()
oraz
![]()
![]()
- Obliczamy wartości kątów pomocniczych
 ,
,
![]()
- Obliczamy odległości D1, D2
![]()
![]()
Obliczamy
współrzędne pozycji M(![]() )
względem radiolatarni S1 lub radiolatarni S2.
Wykorzystujemy do tego celu wzory:
)
względem radiolatarni S1 lub radiolatarni S2.
Wykorzystujemy do tego celu wzory:
![]()
![]()
![]()
![]()
oraz
![]()
Współrzędne
pozycji statku można także obliczyć według następujących wzorów:
![]()
![]()
oraz
![]()
![]()
Z powodu tego, że wartości
zbieżności południków ![]() są wartościami przybliżonymi to wyżej
obliczone współrzędne pozycji są współrzędnymi przybliżonymi. W celu
dokładniejszego obliczenia współrzędnych należy wprowadzić kolejne
przybliżenia. Oznacza to, że obliczone w pierwszym kroku współrzędne pozycji
przyjmujemy jako zliczone i dla nich obliczamy zbieżność południków. Możemy
zaprzestać po pierwszym przybliżeniu.
są wartościami przybliżonymi to wyżej
obliczone współrzędne pozycji są współrzędnymi przybliżonymi. W celu
dokładniejszego obliczenia współrzędnych należy wprowadzić kolejne
przybliżenia. Oznacza to, że obliczone w pierwszym kroku współrzędne pozycji
przyjmujemy jako zliczone i dla nich obliczamy zbieżność południków. Możemy
zaprzestać po pierwszym przybliżeniu.
Skoro wartości ![]() oraz
oraz ![]() obliczalibyśmy z układu równań
obliczalibyśmy z układu równań
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
oraz
R*x8+S*x6+T*x4+U*x2-K2
= 0,
![]()
to kolejność dalszych obliczeń mogłaby być następująca:
![]()
Wartości kątów ![]() obliczamy
z wzorów sinusów lub cotangensów:
obliczamy
z wzorów sinusów lub cotangensów:
![]()
lub
![]()
Odwrotne namiary ortodromiczne otrzymamy odejmując (dodając) od wartości wzajemnych azymutów radiolatarni, wartości kątów
![]()
![]()
Azymuty
radiolatarni obliczamy według wzorów:
![]()
![]()
lub
![]()
![]()
Szerokość geograficzną natomiast obliczamy według wzoru:
![]()
![]()
lub
![]()
![]()
2. Estymacja pozycji z dwóch namiarów obcych.
W nawigacji namiarami obcymi nazywamy
namiary określone przez radiostacje namierzające lub gdy wykorzystywane są
systemy radionawigacyjne „Consol” lub „Consolan”.
Wielkościami znanymi są:
- Namiary (ortodromiczne) z radiostacji na statek
Nst1=A1 Nst2=A2
- Współrzędne radiostacji namierzających
![]() ,
, ![]()
Wielkościami szukanymi są
współrzędne pozycji statku ![]() .
.
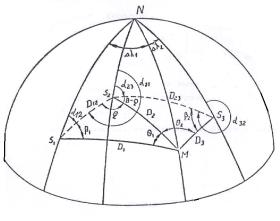
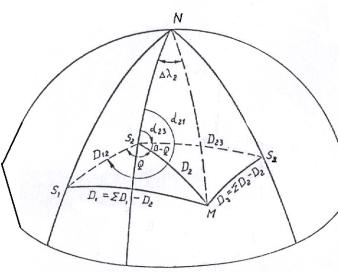
Rys. 2.
Elementy geometryczne obliczania pozycji z dwóch namiarów obcych.
Kolejność
obliczeń jest następująca:
- Obliczamy wielkości pomocnicze, stałe dla danej pary radiostacji.
Są to: azymut ze stacji S1 na S2 (a12) i ze stacji S2
na S1 (a21) oraz odległość między
stacjami D. Z trójkąta sferycznego NS1S2 mamy:
![]()
![]()
oraz
![]()
Do obliczeń wartości
azymutów i odległości między stacjami wykorzystuje się też wzory sinusów (po
wcześniejszym obliczeniu wartości D lub a za pomocą jednego z
poprzednich wzorów):
![]()
![]()
stąd
![]()
![]()
![]()
- Obliczamy odległości od radiostacji do statku (D1 i D2):
![]()
![]()
![]() ,
,
gdzie:
D1, D2 – odległości od
radiostacji do statku,
A1, A2 – namiary ortodromiczne z
radiostacji na statek.
Znając obliczone wartości
obliczymy współrzędne pozycji statku w zależności od współrzędnych radiostacji
S1 lub S2 korzystając z następujących zależności:
![]()
![]()
![]()
![]()
oraz
![]()
Współrzędne
pozycji statku można także obliczyć według następujących wzorów:
![]()
![]()
oraz
![]()
![]()
3. Estymacja pozycji z dwóch kątów poziomych.
Zadanie to jest podobne do zadania
polegającego na obliczeniu współrzędnych z dwóch namiarów własnych. Należy w
nim obliczyć współrzędne pozycji statku z dwóch kątów zmierzonych pomiędzy
trzema radiolatarniami (znakami nawigacyjnymi).
Rys.
3 Elementy geometryczne
obliczania pozycji z dwóch kątów poziomych.
Wielkościami
znanymi są:
Ø Kąty sferyczne ![]() .
.
Ø Współrzędne znaków
nawigacyjnych:
![]() ,
, ![]() ,
,
![]() .
.
Wielkości szukane to współrzędne pozycji statku M(![]() )
)
W tym zadaniu nie możemy
zastosować rozwiązań przybliżonych, tak jak robiliśmy to podczas obliczania
współrzędnych z namiarów własnych. Aby obliczyć współrzędne pozycji M, musimy
najpierw obliczyć wartości kątów i boków w trójkątach sferycznych S1S2M
oraz MS2S3.
Kolejność obliczeń:
Ø obliczamy wartości azymutów
![]()
kąt ![]()
oraz odległości D12,
D23, D13 między radiolatarniami S1 i S3
Wykorzystujemy do tego celu wzory
zamieszczone w części dotyczącej estymacji pozycji z dwóch namiarów obcych:
![]()
![]()
oraz
![]()
![]()
Do obliczeń wartości azymutów
i odległości między stacjami wykorzystuje się też wzory sinusów (po
wcześniejszym obliczeniu wartości D lub a za pomocą jednego z
poprzednich wzorów):
![]()
![]()
stąd
![]()
![]()
![]()
Ø
Obliczamy wartość kąta Q
oraz (B-Q). Aby to zrobić należy rozwiązać układ trzech równań
trygonometrycznych:
![]()
![]()
![]() .
.
Po obliczeniu wartości Q i B-Q możemy
obliczyć D1 oraz D2, korzystając z dwóch pierwszych
równań układu.
Ø
Obliczamy także wartości
kątów ![]() oraz
oraz
![]()
Aby osiągnąć zamierzony cel rozwiązujemy
dwa układy równań trygonometrycznych, po dwa równania w każdym:
Ø
Obliczamy współrzędne
pozycji statku M(![]() ):
):
![]()
![]()
oraz
![]()
![]()
![]()
![]() ,
,
![]() .
.
4. Estymacja pozycji z dwóch odległości.
Podczas obliczania współrzędnych
z dwóch odległości znamy:
v Odległości do dwóch znaków
nawigacyjnych D1, D2,
v Współrzędne tych znaków
nawigacyjnych S1(![]() ),
S2(
),
S2(![]() ).
).
Szukamy natomiast
współrzędnych pozycji statku M(![]() ).
).
Rys. 4
Elementy geometryczne obliczania pozycji z dwóch odległości.
Kolejność obliczeń:
v Obliczamy stałe elementy
danej pary znaków nawigacyjnych
![]() i D
i D
Wykorzystujemy w tym celu
następujące wzory:
![]()
![]() ,
,
![]() ,
,
![]() .
.
v Obliczamy kąty ![]() oraz
oraz ![]() w trójkącie sferycznym S1S2M:
w trójkącie sferycznym S1S2M:
v Obliczamy wartości namiarów
ortodromicznych ze znaków nawigacyjnych na pozycję statku M
v Współrzędne dotyczące
pozycji statku M obliczamy z następujących wzorów:
![]()
![]()
![]()
![]()
5. Estymacja pozycji z dwóch różnic odległości.
Podczas obliczania
współrzędnych tą metodą do wartości znanych należą:
ü Dwie różnice odległości ![]()
ü Współrzędne trzech stacji
systemu radionawigacyjnego S1(![]() ,
S2(
,
S2(![]() )
oraz S3(
)
oraz S3(![]() ).
).
Wielkości szukane to współrzędne
pozycji statku M(![]() ).
).
Rys. 5.
Elementy geometryczne obliczania pozycji z dwóch różnic odległości.
Kolejność obliczeń:
ü Obliczamy stałe elementy
wybranych dwóch par stacji:
![]() oraz kąt
oraz kąt ![]() .
.
ü Obliczamy wartość kąta Q lub
B-Q.
Zaczynamy od:
stąd
![]()
![]()
Po rozwinięciu lewych stron
ostatniego układu równań i podzieleniu go przez cosD2 otrzymamy:
![]() [23]
[23]
Wprowadzamy następujące oznaczenia dla
stałych współczynników:
![]() . [24]
. [24]
Równanie [23] po uwzględnieniu [24] przyjmie postać:
![]()
lub postać:
![]() . [25]
. [25]
Wprowadźmy
oznaczenie:
![]() .
[26]
.
[26]
Gdy
uwzględnimy [26] to równanie [25] przyjmuje postać:
![]() .
.
Możemy więc obliczyć wartość kąta Q:
![]()
Znając wartość kąta Q lub B-Q, możemy obliczyć
odległość D2 według wzoru:
![]() .
.
ü Obliczamy współrzędne
pozycji statku M(![]() )
w stosunku do współrzędnych stacji S2(
)
w stosunku do współrzędnych stacji S2(![]() ):
):
![]()
6. Estymacja pozycji z dwóch sum odległości.
Przy obliczaniu
współrzędnych z dwóch sum odległości dane mamy:
- Dwie sumy odległości
 ,
, - Współrzędne trzech stacji systemu radionawigacyjnego, względem
których zmierzono te sumy odległości:
![]()
Współrzędne pozycji statku M
obliczamy w stosunku do współrzędnych stacji S2(![]() ).
).
Rys. 6.
Elementy geometryczne obliczania pozycji z dwóch sum odległości.
Kolejność wykonywania obliczeń jest następująca:
·
Obliczamy
elementy stałe wcześniej wybranych dwóch par stacji
![]() , D12, D23
oraz kąt
, D12, D23
oraz kąt ![]()
gdzie,
![]()
![]()
![]()
![]()
![]()
·
Obliczamy
kąt Q lub B-Q, wykonując podobne przekształcenia jak przy obliczaniu wartości
tego kąta dla pozycji z dwóch różnic odległości.
Zaczynamy od tego, że:
![]()
![]() ,
,
stąd
![]()
![]() .
.
Po rozwinięciu lewych stron układu
równań oraz podzieleniu przez cosD2 otrzymamy:
 .
.
Wartość pomocniczego kąta ![]() można
obliczyć ze wzoru:
można
obliczyć ze wzoru:
![]() ,
,
gdzie
 .
.
Natomiast sumę kątów ![]() i
i ![]() wyliczymy
ze wzoru:
wyliczymy
ze wzoru:
![]() .
.
Wykorzystując to, że znamy
wartość kąta Q lub B-Q możemy odległość D2 obliczyć ze wzoru:

·
Współrzędne
pozycji okrętu M(![]() )
obliczymy w zależności od współrzędnych S2(
)
obliczymy w zależności od współrzędnych S2(![]() ),
korzystając ze wzorów
),
korzystając ze wzorów
![]()
7. Estymacja pozycji z namiaru własnego i odległości.
Podczas obliczania pozycji
statku M(![]() )
z namiaru własnego i odległości znamy:
)
z namiaru własnego i odległości znamy:
- Wartość namiaru własnego A.
- Odległość do znaku nawigacyjnego D.
- Współrzędne znaku nawigacyjnego S1(
 ).
). -
Rys. 7.Elementy
geometryczne obliczania pozycji z namiaru własnego i odległości.
Kolejność obliczeń:
- Obliczamy różnicę długości geograficznej ze wzoru:
![]() .
.
- Obliczamy szerokość geograficzną pozycji statku
 .
Aby to uczynić rozwiązujemy równanie:
.
Aby to uczynić rozwiązujemy równanie:
![]() .
.
Szerokość geograficzną można
też obliczyć używając wzoru:
![]()
gdzie
![]() - namiar obcy, obliczony ze wzoru:
- namiar obcy, obliczony ze wzoru:
![]() ,
,
gdzie zbieżność południków ![]() obliczamy następująco:
obliczamy następująco:
![]()
Z tego względu, że znana jest dokładnie wartość różnicy
długości ![]() ze wzoru:
ze wzoru:
![]() ,
,
to zbieżność południków jest
obliczona prawie dokładnie.