Estymacja pozycji statku na
płaszczyźnie
Obliczanie pozycji zliczonej na płaszczyźnie.
1. Estymacja pozycji z dwóch kątów poziomych.
2. Estymacja pozycji z dwóch namiarów obcych.
3. Estymacja pozycji z dwóch odległości.
4. Estymacja pozycji z dwóch różnic odległości.
5. Estymacja pozycji z dwóch sum odległości.
6. Estymacja pozycji z namiaru i odległości.
7. Estymacja pozycji z namiaru i kąta poziomego.
8. Estymacja pozycji z odległości i kąta poziomego.
9. Estymacja pozycji z odległości i różnicy odległości.
10. Estymacja pozycji z różnicy i sumy odległości.
Obliczanie
pozycji zliczonej na płaszczyźnie.
Warunek stosowania płaszczyzny do obliczeń
nawigacyjnych bez konieczności redukcji parametrów pozycyjnych.
Pewien obszar powierzchni Ziemi
można traktować jako płaszczyznę, do takiej odległości od obserwatora, do
jakiej kulistość jej nie wpływa praktycznie na pomiary parametrów
nawigacyjnych. Powinniśmy zastanowić się nad wpływem aproksymacji powierzchni
Ziemi przez płaszczyznę na pomiary liniowe i kątowe.
Do określenia różnicy pomiędzy
odległością na kuli D1 i odległością na płaszczyźnie D używamy
wzoru:
![]()
gdzie:
R – średni promień Ziemi (6371109,7 według
Krasowskiego).
Stąd otrzymujemy:
![]()
Widzimy więc, że maksymalna
odległość na powierzchni Ziemi D1, którą można aproksymować
płaszczyzną zależna jest od dokładności pomiarów liniowych. Należy pamiętać, że
![]() powinna być dziesięciokrotnie mniejsza od
dokładności pomiarów liniowych.
powinna być dziesięciokrotnie mniejsza od
dokładności pomiarów liniowych.
Przy pomiarach kątowych (kątów poziomych) przyjmuje się
trójkąt sferyczny jako płaski, gdy wartość ![]() ekscesu sferycznego nie przekracza takiej
wartości błędu pomiaru kąta, którą można pominąć. Promień obszaru, który
zawiera maksymalny trójkąt sferyczny obliczamy ze wzoru:
ekscesu sferycznego nie przekracza takiej
wartości błędu pomiaru kąta, którą można pominąć. Promień obszaru, który
zawiera maksymalny trójkąt sferyczny obliczamy ze wzoru:
![]()
gdzie:
![]() - okres sferyczny.
- okres sferyczny.
Trójkąt taki traktujemy z reguły jako płaski.
Należy też pamiętać, że przy pomiarach kątowych powierzchnię
Ziemi w promieniu 35 mil morskich można traktować jako płaską.
Podczas wykonywania namiarów ustalających odległość, dla jakiej
uważa się powierzchnię Ziemi jako płaską, należy uwzględnić wartość zbieżności
południków (![]() ).
Obliczeń dokonujemy ze wzoru:
).
Obliczeń dokonujemy ze wzoru:
![]() .
.
Ze względu na to, że ![]() oraz
oraz ![]() to wartości małe, przyjmujemy dla małych
kątów:
to wartości małe, przyjmujemy dla małych
kątów:
![]() .
.
Wartość
zbieżności południków określa wielkość odchylenia ortodromy od loksodromy.
Widzimy więc, że odległość, dla której powierzchnię Ziemi można
uważać za płaską, zależy tak od ![]() ,
jak i od
,
jak i od ![]() .Tylko
dla południków i równika odległość ta jest nieograniczona.
.Tylko
dla południków i równika odległość ta jest nieograniczona.
1.
Estymacja pozycji z dwóch kątów poziomych.
Wyznaczając pozycję statku z kątów poziomych znamy:
v Współrzędne trzech znaków
nawigacyjnych:
![]() A(XA,YA),
B(XB,YB), C(XC,YC).
A(XA,YA),
B(XB,YB), C(XC,YC).
v Kąty poziome ![]() i
i ![]() .
.
Współrzędne punktu M(X,Y) możemy
obliczyć zarówno w stosunku do punktu A(XA,YA), jak i
punktu C(XC,YC):
![]() ,
,
![]() .
.
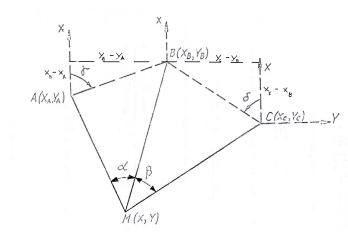
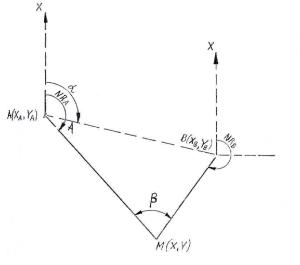
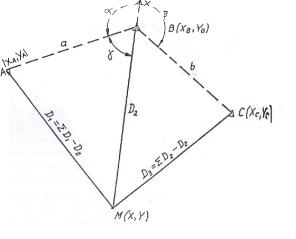
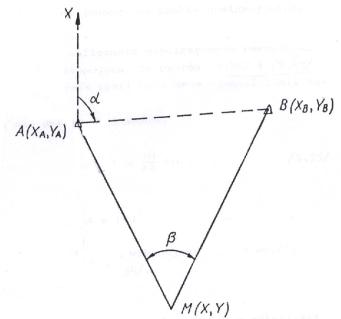
Rys. 1.
Elementy geometryczne obliczania pozycji z dwóch kątów poziomych.
Kolejność obliczeń:
v Obliczamy azymut linii baz ![]() i
i ![]() :
:

v Obliczamy długość linii baz
AB i CB:
v Obliczamy wartość kąta B w
czworoboku ABCM:
![]() .
.
v Obliczamy wartość połowy
sumy kątów A i C:
![]()
a także wartość połowy różnicy kątów A i C. Aby to
osiągnąć obliczamy długość odcinka BM z trójkątów MAB i MBC:
![]()
stąd
![]() ,
,
szukamy takiego kąt Q, aby
![]()
wtedy równanie
![]() ,
,
przyjmie postać:
![]() ,
,
Napiszemy proporcję pochodną do proporcji
![]()
Powstałe równanie przekształcamy następująco:
 ,
,
to
![]() .
.
Ponieważ
![]() ,
,
to
![]() .
.
Wprowadzimy oznaczenie
![]() .
.
Znamy
zatem połowę sumy i połowę różnicy wartości nieznanych kątów A i B, to
A =
m + n
C = m – n
v Obliczamy długość odcinków
AM i CM
v Obliczamy przyrost
współrzędnych: ![]() lub
lub ![]() :
:
![]() ’
’
lub
![]()
Aby
otrzymać współrzędne pozycji statku M(X,Y) należy wartości przyrostów współrzędnych
wstawić do równania:
![]() ,
,
![]() .
.
2.
Estymacja pozycji z dwóch namiarów obcych.
W tym przypadku do obliczeń wykorzystujemy współrzędne
prostokątne płaskie (X,Y) dlatego, że jest to o wiele prostsze i skraca zapis.
Podczas określania pozycji
statku z dwóch namiarów obcych znamy:
q Współrzędne znaków
nawigacyjnych: A(XA,YA), (XB,YB).
q Wartości namiarów z punktów
A i B na statek: NRA, NRB oraz różnicę namiarów.
Szukamy natomiast współrzędnych punktu M, które można
wyrazić w zależności od współrzędnych punktu A jak i B:
![]()
![]()
W
tym przypadku przedstawimy je w stosunku do znaku nawigacyjnego A.
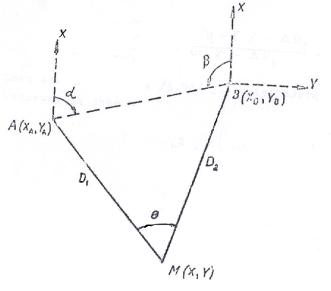
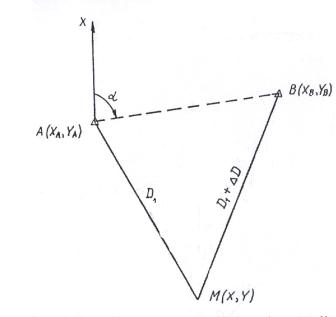
Rys. 2.
Elementy geometryczne obliczania pozycji z dwóch namiarów obcych.
Kolejność
obliczeń jest następująca:
q Szukamy wartości
pomocniczego kąta ![]() (azymut linii bazy w punkcie A):
(azymut linii bazy w punkcie A):
![]() .
.
q Obliczamy odległość AB
(długość linii bazy):
![]()
q Obliczamy wartość kąta A w
trójkącie ABM:
![]() .
.
q Obliczamy długość boku AM:
![]()
q Obliczamy wartość ![]() oraz
oraz
![]() :
:
![]()
Aby otrzymać rozwiązanie należy rozwiązać równania:
![]()
![]()
3.
Estymacja pozycji z dwóch odległości.
Przy określaniu pozycji z dwóch
odległości wartości jakie znamy to:
Współrzędne dwóch znaków nawigacyjnych : A, B.
Wartości
odległości: D1(AM), D2(BM).
- Szukamy współrzędnych punktu M.
-
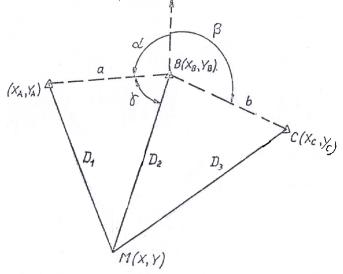
Rys. 3.
Elementy geometryczne obliczenia pozycji z dwóch odległości.
Kolejność obliczeń:
- Obliczamy wartość azymutu
 (bazy AB):
(bazy AB):
![]() .
.
- Obliczamy długość linii bazy (AB):
![]() .
.
- Obliczamy wartość kąta A:
![]() .
.
- Obliczamy przyrosty współrzędnych:
![]()
Wstawiając wartości przyrostów współrzędnych do
równania
![]()
![]()
otrzymamy szukane współrzędne pozycji statku M.
4.
Estymacja pozycji z dwóch różnic odległości.
Podczas estymacji pozycji
statku znamy następujące wartości:
- Współrzędne trzech znaków nawigacyjnych A(XA,YA),
B(XB,YB), C(XC,YC).
- Dwie różnice odległości:
![]() ,
,
![]() .
.
Rys. 4.
Elementy geometryczne obliczenia pozycji z dwóch różnic odległości.
Kolejność
obliczeń:
- Obliczamy azymuty linii baz
 i
i 
- Obliczamy wartość kąta B w czworoboku ABCM:
![]() .
.
- Obliczamy długość linii baz AB = a, BC = b:
- Obliczamy odległość D2 i wartość kąta
 .
W tym celu z trójkątów ABM i BCM wyznaczamy:
.
W tym celu z trójkątów ABM i BCM wyznaczamy:
![]()
![]()
Z równań tych wyznaczymy D2
ale kąt ![]() pozostaje nadal nieznany,
pozostaje nadal nieznany,
![]() ,
,
![]() stąd
stąd
![]()
 .
.
Lewa strona powstałego równania jest
wielkością znaną i oznaczymy ją jako k. Wówczas nasze równanie przyjmie postać:
![]()
Wprowadźmy oznaczenie pomocnicze:
![]() .
.
Wówczas równanie
![]()
przyjmie postać:
![]() ,
,
a stąd
![]()
Mamy więc
![]() .
.
Możemy teraz wyznaczyć wartość D2 z
równania
![]() .
.
![]()
- Obliczamy przyrosty współrzędnych w stosunku do punktu B:
![]()
- Obliczamy współrzędne pozycji statku:
![]()
5.
Estymacja pozycji z dwóch sum odległości.
Wyznaczając pozycję statku z
dwóch sum odległości znamy:
Ø Współrzędne trzech znaków
nawigacyjnych A, B, C.
Ø Dwie sumy odległości ![]() i
i ![]() .
.
Współrzędne pozycji M
obliczamy w stosunku do środkowego znaku nawigacyjnego B(XB,YB).
Rys. 5.
Elementy geometryczne obliczania pozycji z dwóch sum odległości.
Kolejność obliczeń:
Ø Obliczamy azymuty linii baz ![]() i
i ![]() :
:
Ø Obliczamy wartość kąta B w
czworoboku ABCM:
![]() .
.
Ø Obliczamy długość linii baz
AB = a, BC = b:
Ø Obliczamy odległość D2
i wartość kąta ![]() .
W tym celu z trójkątów ABM i BCM wyznaczamy:
.
W tym celu z trójkątów ABM i BCM wyznaczamy:
![]()
![]()
Z równań tych wyznaczymy D2
ale kąt ![]() pozostaje nadal nieznany,
pozostaje nadal nieznany,
 ,
,
 .
.
Lewa strona powstałego równania jest
wielkością znaną i oznaczymy ją jako k. Wówczas nasze równanie przyjmie postać:

Wprowadźmy oznaczenie pomocnicze:
![]() .
.
Wówczas równanie 
przyjmie postać:
![]() ,
,
a stąd
![]()
Mamy więc
![]() .
.
Możemy teraz wyznaczyć wartość D2 z
równania
![]() .
.
![]()
Ø Obliczamy przyrosty
współrzędnych w stosunku do punktu B:
![]()
Ø Obliczamy współrzędne
pozycji statku:
![]()
6.
Estymacja pozycji z namiaru i odległości.
Chcemy obliczyć współrzędne
statku z namiaru i odległości do znaku nawigacyjnego A(XA,YA).
Wielkości, które mamy dane to:
v Współrzędne znaku
nawigacyjnego A(XA,YA).
v Namiar rzeczywisty NR i kąt ![]() =
NR
=
NR![]() 180°.
180°.
v Odległość od znaku
nawigacyjnego.
v
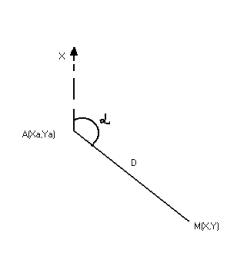
Rys. 6.
Elementy geometryczne obliczania pozycji z namiaru i odległości.
Przyrosty współrzędnych
wynoszą:
![]()
Stąd pozycja okrętu:
![]()
7.
Estymacja pozycji z namiaru i kąta poziomego.
Kiedy daną mamy wartość kąta poziomego i namiar na
jeden z dwóch znaków nawigacyjnych, którego współrzędne są znane, to kolejność
wyznaczania pozycji statku, w stosunku do współrzędnych znaku na który
określono namiar jest następująca:
ü Obliczamy kąt bazowy ![]() :
:
![]() .
.
ü Obliczamy długość linii bazy
AB:
![]() .
.
ü Obliczamy kąty A i B w
trójkącie ABM:
![]()
ü Obliczamy odległość AM:
![]() .
.
ü Obliczamy przyrosty
współrzędnych:
![]()
ü Obliczamy współrzędne
pozycji okrętu:
![]()
Rys. 7.
Elementy geometryczne obliczania pozycji z namiaru i kąta poziomego.
8.
Estymacja pozycji z odległości i kąta poziomego.
W tym sposobie wyznaczania
pozycji wartości znane to
- Współrzędne dwóch znaków nawigacyjnych A(XA,YA),
B(XB,YB).
- Kąt poziomy
 .
. - Odległość do jednego ze znaków nawigacyjnych AM=D.
Obliczenia wykonujemy według następującej kolejności:
- Obliczamy azymut linii bazy:
![]() .
.
- Obliczamy długość linii bazy AB:
![]() .
.
Dalsze obliczenia to :
- Obliczamy przyrosty współrzędnych:
![]()
- Obliczamy współrzędne pozycji statku:
![]()
9.
Estymacja pozycji z odległości i różnicy odległości.
Wielkości znane to:
q Współrzędne dwóch znaków
nawigacyjnych A i B.
q Różnica odległości do tych
znaków ![]() .
.
q Odległość do jednego z tych
znaków D1=AM.
Rys. 8.
Elementy geometryczne obliczania pozycji z odległości i różnicy
odległości.
Aby uzyskać pozycję statku M
za pomocą odległości i różnicy odległości należy postępować tak, jak przy
wyznaczaniu pozycji z dwóch odległości. Możemy tak uczynić ponieważ odległość ![]() jest także wielkością znaną.
jest także wielkością znaną.
Kolejność obliczeń:
q Obliczamy wartość azymutu ![]() (bazy AB):
(bazy AB):
![]() .
.
q Obliczamy długość linii bazy
(AB):
![]() .
.
q Obliczamy wartość kąta A:
![]() .
.
q Obliczamy przyrosty
współrzędnych:
![]()
Wstawiając wartości przyrostów współrzędnych do
równania
![]()
![]()
Otrzymamy szukane współrzędne pozycji statku M.
10. Estymacja
pozycji z różnicy i sumy odległości.
Przy szukaniu współrzędnych
pozycji tą metodą wartościami znanymi są:
Ø Współrzędne trzech znaków
nawigacyjnych A(XA,YA), B(XB,YB),
C(XC,YC).
Ø Różnica odległości ![]() .
.
Ø Suma odległości ![]() .
.
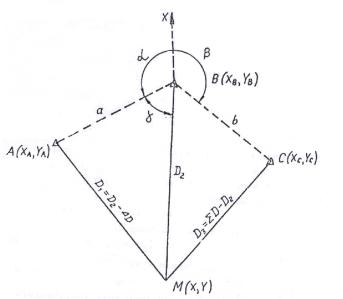
Rys. 9.
Elementy geometryczne obliczania pozycji z różnicy i sumy odległości.
Kolejność obliczeń:
Ø Obliczamy azymuty linii baz ![]() i
i ![]()
Ø Obliczamy wartość kąta B w
czworoboku ABCM:
![]() .
.
Ø Obliczamy długość linii baz
AB = a, BC = b:
Ø Obliczamy odległość D2
i wartość kata ![]() :
:
![]() ,
,
![]() .
.
Ø Następnie przechodzimy do:
 .
.
Wyrażenie
to przekształćmy do postaci:
![]() .
.
Lewą
stronę powstałego równania oznaczmy przez k, dzięki czemu zapiszemy je w inny
sposób:
![]()

Wprowadźmy oznaczenie pomocnicze:
![]() .
.
Wówczas równanie:

przyjmie postać:
![]() ,
,
a stąd
![]()
Mamy więc
![]() .
.
![]()
Ø Obliczamy przyrosty
współrzędnych w stosunku do punktu B:
![]()
Ø Obliczamy współrzędne
pozycji statku:
![]()
We
wszystkich tych obliczeniach przedstawione zostały metody umożliwiające wyznaczenie
współrzędnych pozycji statku z pomiarów dwóch jednorodnych lub niejednorodnych
parametrów nawigacyjnych, które stosuje się najczęściej w nawigacji morskiej.
Przechodząc
ze współrzędnych geograficznych (j,l) na współrzędne płaskie (X,Y) posługujemy
się wzorami: