OBLICZANIE WSPÓŁRZEDNYCH NA POWIERZCHNI ELIPSOIDY OBROTOWEJ
Opis metod przenoszenia współrzędnych
1. Metody wykorzystujące punkt pomocniczy.
1.1. Metoda Clarke’a (zadanie wprost)
1.2. Metoda Clarke’a (zadanie odwrotne).
2. Metody wykorzystujące szeregi potęgowe Legendre’a.
2.1. Metoda średniej szerokości Gaussa - zadanie wprost
2.2. Metoda średniej szerokości Gaussa zadanie odwrotne.
3.1. Metoda Bessela zadanie wprost
3.2. Metoda Bessela zadanie odwrotne
4. Metody wykorzystujące cięciwy elipsoidy.
Opis metod
przenoszenia współrzędnych
Klasyczny problem
obliczania współrzędnych geodezyjnych na powierzchni elipsoidy obrotowej oraz
azymutów i długości linii geodezyjnych nosi nazwę przenoszenia współrzędnych.
Wyróżniamy dwa rodzaje problemu: tzw. zadanie wprost i zadanie odwrotne.
Zadanie pierwsze zwane zadaniem wprost dotyczy
obliczenia współrzędnych geodezyjnych B2, L2 punktu P2
i azymutu (odwrotnego) A21 linii geodezyjnej, gdy znane są
współrzędne geodezyjne B1, L1 punktu P1,
długość linii geodezyjnej s12 oraz azymut (wprost) A12,
pod jakim linia geodezyjna wychodzi z punktu P1.
Zadanie
drugie zwane zadaniem odwrotnym dotyczy obliczenia długości linii
geodezyjnej s12 łączącej na powierzchni elipsoidy dwa punkty o
znanych współrzędnych P1 (B1, L1) i P2
(B2, L2) oraz obliczenia azymutów linii geodezyjnej
(wprost i odwrotnego) A12 i A21.
Z
powodu wysokich wymagań dokładności a także trudności bezpośredniego
rozwiązywania zadań związanych z przenoszeniem współrzędnych na powierzchni
elipsoidy ziemskiej, geodezja wyższa staje się ważnym elementem związanym z
nawigacją. Wymagania te polegają na opracowaniu wzorów zapewniających pewną
dokładność obliczeń, przy odpowiednim stopniu ich skomplikowania w zależności
od sprzętu, którym dysponuje liczący. Stworzono wiele algorytmów i różnych
pomocy rachunkowych. W obecnych latach, z uwagi na automatyzację obliczeń,
wiele wcześniej dostępnych metod obliczania współrzędnych utraciło swoje dawne
znaczenie. Powstały i ciągle powstają nowe metody.
Najogólniej
metody klasyczne obliczania współrzędnych dzielimy na cztery grupy:
- Metody wykorzystujące punkt
pomocniczy.
- Metody wykorzystujące szeregi
potęgowe Legendre’a.
- Metody bezpośrednie.
- Metody wykorzystujące cięciwy
elipsoidy.
1. Metody wykorzystujące punkt pomocniczy.
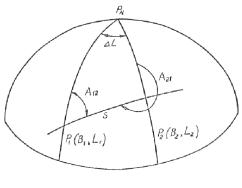
Kiedy
odległość pomiędzy punktami początkowym i końcowym linii geodezyjnej s jest
rzędu kilkudziesięciu kilometrów to trójkąt geodezyjny P1P2B
jest bardzo smukły (rys.1.), ponieważ dwa jego boki łączące punkty linii
geodezyjnej z biegunem mogą osiągać znaczne długości. Niekorzystne byłoby z
uwagi na dokładność obliczeń stosowanie bezpośrednich metod rozwiązywania
takiego trójkąta.
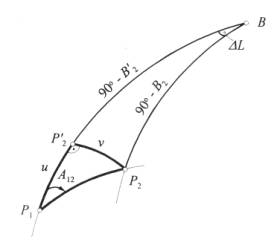
Rys. 1. Metoda punktu pomocniczego
Kiedy
prowadzimy przekrój normalny przez punkt P2 prostopadły do południka
punktu P1 otrzymujemy mały prostokątny trójkąt P1P2’
P2, który rozwiązuje się na sferze o promieniu Rs1. Wyznaczenie
boku u tego trójkąta pozwala na wyliczenie szerokości punktu P2’,
którą można traktować jako przybliżenie poszukiwanej szerokości punktu P2.
Poprawkę do takiej przybliżonej szerokości można dostatecznie dokładnie
wyznaczyć z trójkąta P2’BP2. Dla wyznaczenia ![]() i
i ![]() budujemy pewien sferyczny
trójkąt biegunowy.
budujemy pewien sferyczny
trójkąt biegunowy.
Metoda
punktu pomocniczego w wersji Clarke’a służy zazwyczaj do rozwiązywania zadania
wprost dla odległości do 30 kilometrów. W wersji Schreibera, połączona z
szeregami potęgowymi, nadaje się do odległości 60 km a nawet 120 km w
zależności od rzędu wyrazów (różniczek) wykorzystanych w szeregach potęgowych
(trzeci lub czwarty rząd).
1.1. Metoda
Clarke’a (zadanie wprost)
Rys. 2. Trójkąt sferoidalny.
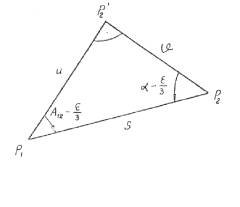
Rys. 3 Trójkąt płaski
Na
elipsoidzie o parametrach a i e dany jest punkt P1 (rys.2.) o
współrzędnych B1 i L1, znamy również odległość geodezyjna
s = P1P2 oraz azymut A12. Obliczyć mamy współrzędne
B2, L2 punktu P2 oraz azymut A21
(azymut odwrotny).
Kiedy
z punktu P2 poprowadzimy ortodromę (linię geodezyjną) prostopadłą do
południka P1PN wtedy punkt P2 będzie stanowił
punkt przecięcia ortodromy z południkiem P1PN. Z powodu
tego, że boki trójkąta P1P2P2’ są małe, to
zgodnie z twierdzeniem Bessela, trójkąt ten można uważać za trójkąt sferyczny
na kuli o promieniu ![]() . W wyniku tego otrzymujemy trójkąt sferyczny o elementach:
. W wyniku tego otrzymujemy trójkąt sferyczny o elementach:
A12, ![]() , u, v, s oraz
, u, v, s oraz ![]() .
.
Nadmiar sferyczny obliczamy ze wzoru:
![]()
gdzie:
![]() - nadmiar
sferyczny,
- nadmiar
sferyczny,
R – promień kuli,
P – powierzchnia trójkąta płaskiego o
elementach A12, s, ![]() ,
,
P = ![]() ,
,
![]() ,
,
![]() ,
,
![]() - wartość jednego
radiana wyrażona w sekundach kątowych.
- wartość jednego
radiana wyrażona w sekundach kątowych.
Jeśli pozbędziemy się drugiego
członu otrzymamy, że:
 ,
,
gdzie:
s – długość linii geodezyjnej,
A12- azymut wprost,
M,N – główne promienie krzywizny.
W
trójkącie sferycznym P1P2P2’ możemy określić
kąt
![]() .
.
„Twierdzenie
Legendre’a mówi, że mały trójkąt sferyczny można rozwiązać zamieniając go na
trójkąt płaski, w którym długości boków pozostają niezmienione w stosunku do
odpowiednich długości na sferze, każdy kąt zaś jest zmniejszony o ![]() nadmiaru
sferycznego.”
nadmiaru
sferycznego.”
W wyniku użycia twierdzenia
Legendre’a dla małych trójkątów rozwiązujemy trójkąt płaski u, v, s, którego
kąty są równe:
przy czym
![]() .
.
Jeśli
zastosujemy wzory sinusowe trygonometrii płaskiej uzyskamy wtedy elementy
małego trójkąta sferycznego:
 ,
,
 ,
,
gdzie:
s – długość linii geodezyjnej,
A12- azymut wprost,
![]() - nadmiar
sferyczny,
- nadmiar
sferyczny,
![]() - wartość stała.
- wartość stała.
Wiemy, że ![]() przyjmuje wartość małego kąta dlatego zakładamy
przyjmuje wartość małego kąta dlatego zakładamy
![]() .
.
Kontynuując otrzymujemy:
![]() ,
,
![]() .
.
Wykorzystując
obliczoną wartość u obliczymy B2’, a następnie B2. W tym
celu obliczymy najpierw wielkość ![]() jako kąt środkowy
odpowiadający łukowi kołowemu u o promieniu M1. Następnie obliczamy
przybliżoną wartość szerokości geodezyjnej Bs dla punktu Ps
pośredniego między P1 i P2’ czyli:
jako kąt środkowy
odpowiadający łukowi kołowemu u o promieniu M1. Następnie obliczamy
przybliżoną wartość szerokości geodezyjnej Bs dla punktu Ps
pośredniego między P1 i P2’ czyli:
![]() ,
,
gdzie:
Bs – przybliżona wartość
szerokości geodezyjnej punktu Ps,
B1 – szerokość
geodezyjna dla P1,
B0 – kąt odpowiadający
łukowi kołowemu u o promieniu M1.
![]()
![]() Można teraz
obliczyć Ms dla punktu Ps. Ponieważ u jest łukiem
południka między punktami P1 i P2’, to
Można teraz
obliczyć Ms dla punktu Ps. Ponieważ u jest łukiem
południka między punktami P1 i P2’, to

Kiedy przyjmiemy, że M(B) =
Ms w przedziale [B1, B2’] otrzymamy
gdzie:
Ms – promień krzywizny w punkcie Ps,
B2 – szerokość geodezyjna punktu P2,
B1 – szerokość
geodezyjna dla P1.
Wobec
tego
![]() ,
,
![]() .
.
Według
autora w następnej kolejności powinniśmy obliczyć różnicę B2’ – B2.
Uwzględniając to, że v jest wielkością małą w stosunku do promienia kuli R,
trójkąt P2PnP2’ możemy rozwiązać jako
prostokątny trójkąt sferyczny. Mamy więc:
![]()
czyli
![]() ,
,
skąd
![]() ,
,
więc
![]() ,
,
gdzie:
![]() ,
,
![]() .
.
Z
tego względu, że bok v jest mały, boki ![]() niewiele się od siebie
różnią i różnica
niewiele się od siebie
różnią i różnica ![]() jest małym kątem.
Możemy zatem przyjąć:
jest małym kątem.
Możemy zatem przyjąć:
![]()
czyli
![]() ,
,
![]() .
.
Otrzymamy
wtedy
![]()
i
 .
.
Szerokość geodezyjna punktu P2 będzie
równa:
![]() .
.
Należy jeszcze wyprowadzić
wzór na różnicę długości geodezyjnej
![]() .
.
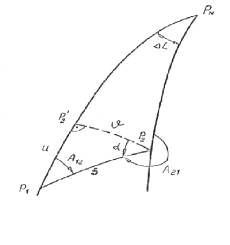
W tym celu skorzystamy z pomocniczej kuli o promieniu ![]() . W punkcie P2 prostopadle do łuku P2P2’
(rys.4.) poprowadzimy ortodromę P2T. Punkt T przecięcia się
ortodromy z południkiem P2’PN jest biegunem łuku P2P2’
(uważanego za łuk koła wielkiego), więc
. W punkcie P2 prostopadle do łuku P2P2’
(rys.4.) poprowadzimy ortodromę P2T. Punkt T przecięcia się
ortodromy z południkiem P2’PN jest biegunem łuku P2P2’
(uważanego za łuk koła wielkiego), więc
![]() .
.
Zatem
w trójkącie P2BT jest
![]() , kąt
, kąt ![]() , kąt
, kąt ![]() .
.
Kąt przy P2 oznaczamy przez ![]() . Jest to zbieżność (konwergencja) południków punktu P1
i punktu P2. Tym sposobem otrzymujemy jeszcze jeden trójkąt P2PsT,
którego boki są równe:
. Jest to zbieżność (konwergencja) południków punktu P1
i punktu P2. Tym sposobem otrzymujemy jeszcze jeden trójkąt P2PsT,
którego boki są równe:
![]() ,
, ![]() ,
, ![]() ,
,
natomiast kąty są równe:
![]() ,
, ![]() ,
, ![]() .
.
W otrzymanym trójkącie występują pewne
elementy ![]() oraz kat
oraz kat ![]() związany z azymutem A21.
W celu rozwiązania trójkąta sferycznego P2PsT
konstruujemy odpowiadający jemu trójkąt biegunowy pnt (rys. 4.). Według
twierdzenia mówiącego, że boki i kąty odpowiednie obu trójkątów dopełniają się
do 180°, otrzymamy następujące
elementy trójkąta biegunowego:
związany z azymutem A21.
W celu rozwiązania trójkąta sferycznego P2PsT
konstruujemy odpowiadający jemu trójkąt biegunowy pnt (rys. 4.). Według
twierdzenia mówiącego, że boki i kąty odpowiednie obu trójkątów dopełniają się
do 180°, otrzymamy następujące
elementy trójkąta biegunowego:
Kąty ![]() ,
, ![]() ,
, ![]() ,
,
Boki ![]() ,
, ![]() ,
, ![]() .
.
Otrzymaliśmy
w ten sposób trójkąt sferyczny o małych bokach, który możemy rozwiązać metodą
Legendre’a. W tym celu musimy znać jego nadwyżkę sferyczną ![]() .
.
Będziemy mieli:
![]() ,
,
gdzie:
![]() - nadwyżka sferyczna,
- nadwyżka sferyczna,
B –szerokość geodezyjna.
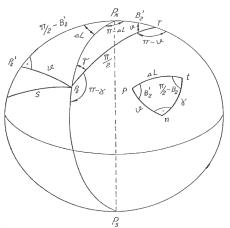
Rys. 4 Kula pomocnicza w metodzie Clarke’a.
Wartość
tę już wcześniej obliczyliśmy. Zatem trójkątem płaskim, który mamy rozwiązać
jest trójkąt o bokach ![]() i
i ![]() , kątach:
, kątach:
![]() ,
, ![]() ,
, ![]() .
.
Korzystamy
z twierdzenia sinusów i otrzymujemy:
 ,
,
gdzie:
v –długość boku pn (rys. 4.),
![]() - nadwyżka sferyczna
- nadwyżka sferyczna
B –szerokość geodezyjna,
![]() - różnica
długości geodezyjnej.
- różnica
długości geodezyjnej.
Należy pamiętać o założeniu, że ![]() . Ponieważ
. Ponieważ ![]() , to
, to
![]() .
.
Mamy
więc
![]()
lub
![]() .
.
Krótki
łuk ortodromy możemy zastąpić łukiem przekroju normalnego poprzecznego w
punkcie P2’, więc przechodząc na miarę kątową za pomocą promienia N’
(dla szerokości B2’) otrzymamy:
![]() ,
,
gdzie:
N’ – promień krzywizny.
Aby
uzyskać zbieżność południków zastosujemy twierdzenie sinusów w postaci:
 ,
,
gdzie:
![]() - zbieżność południków
- zbieżność południków
Stąd zbieżność południków będzie równa:
![]() .
.
Natomiast azymut odwrotny będzie równy:
![]() ,
,
czyli
![]() ,
,
przy czym znak ![]() zależny jest od
wzajemnego usytuowania punktów P1 i P2.
zależny jest od
wzajemnego usytuowania punktów P1 i P2.
„Zadanie
wprost w rzeczywistości rozwiązane na kulach pomocniczych, ale na mocy
twierdzenia Bessela dla długości mniejszych od 50 km, wyniki pozostają ważne
także dla elipsoidy”.
Ostateczne
rozwiązanie:
![]() ,
,
![]() ,
,
![]() .
.
1.2. Metoda
Clarke’a (zadanie odwrotne).
W
zadaniach tego typu dane mamy na elipsoidzie punkty P1 (B1,
L1) i P2 (B2, L2). Znamy więc ![]() i
i ![]() . Szukamy natomiast azymutów A12, A21
oraz długości ortodromy s. Podobnie jak w zadaniu wprost wykorzystamy rozważania
i obliczenia wykonane na kuli pomocniczej. Pomocniczy bok trójkąta obliczymy
przekształcając równanie:
. Szukamy natomiast azymutów A12, A21
oraz długości ortodromy s. Podobnie jak w zadaniu wprost wykorzystamy rozważania
i obliczenia wykonane na kuli pomocniczej. Pomocniczy bok trójkąta obliczymy
przekształcając równanie:
![]() ,
,
wówczas otrzymamy
![]()
gdzie:
v – kąt środkowy
Z
powodu tego, że ![]() jest nieznane, obliczymy
je za pomocą kolejnych przybliżeń. Na początku kroku przyjmijmy
jest nieznane, obliczymy
je za pomocą kolejnych przybliżeń. Na początku kroku przyjmijmy ![]() , to:
, to:
![]() ,
,
gdzie:
v – kąt środkowy.
Uwzględniając [5] oraz [6] mamy
![]() ,
,
gdzie:
v – długość łuku (wymiar liniowy)
Możemy więc obecnie napisać:
![]() .
.
Podstawiając
![]() otrzymamy
otrzymamy
![]() .
.
Wracając do równania [7] i po przekształceniach
otrzymamy następne przybliżenie:
![]() . [8]
. [8]
Wobec tego jako drugie i już wystarczająco dokładne
przybliżenie dla ![]() mamy:
mamy:
![]() ,
,
gdzie:
v – obliczamy ze wzoru [8].
Mamy
więc
![]()
i szerokość średnia
![]() .
.
Obliczamy
następnie długość łuków v’ i u (jako łuków kołowych)
![]() lub
lub ![]() ,
,
oraz
![]() ,
,
gdzie:
v’, u – długości łuków (kołowych),
M, N – główne promienie krzywizny,
B1, B2 – szerokości geodezyjne.
Korzystając z tego, że:
![]() ,
,
mamy:
![]() . [9]
. [9]
Z równań:
 , [10]
, [10]
 ,
,
gdzie:
s – długość linii geodezyjnej,
A12- azymut wprost,
![]() - nadmiar
sferyczny,
- nadmiar
sferyczny,
![]() - wartość stała,
- wartość stała,
wyliczymy:
![]() ,
,
![]() .
.
Zakładając, że ![]() i
i ![]() , będziemy mieli:
, będziemy mieli:
![]() ,
,
skąd
![]() .
.
Uwzględniając [9] mamy:
![]() ,
,
gdzie:
s – długość linii geodezyjnej,
A12 – azymut wprost,
![]() - nadmiar
sferyczny,
- nadmiar
sferyczny,
M, N – główne promienie krzywizny,
v’, u – długości łuków.
W dalszym ciągu będziemy mieli:
 ,
,
czyli
Azymut odwrotny A21 obliczymy ze wzoru:
|
|
gdzie ![]() jest obliczona za
pomocą wzoru:
jest obliczona za
pomocą wzoru:
![]() .
.
Długość łuku
ortodromy obliczymy według wzoru:
lub wzoru
|
|
Ostateczne
rozwiązanie zadania to:
![]() ,
,
1.3. Metoda
Schreibera.
Metoda
Schreibera polega na rozwinięciu różnic współrzędnych i azymutu na szeregi
według potęg długości s ortodromy dla punktu początkowego i końcowego, przy
czym uwzględnione zostają wielkości małe, czwartego rzędu. Zadanie to
rozwiązywać można dla odległości mniejszych od 150 km oraz do szerokości
geodezyjnych niezbyt bliskich
biegunów. Służy ona do rozwiązywania zadania wprost.
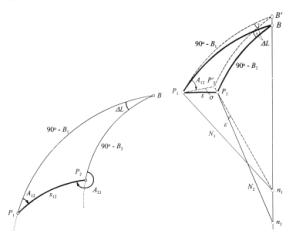
Zajmujemy
się rozwiązaniem trójkąta elipsoidalnego, biegunowego P1P2PN
(rys.5. ). Współrzędne geodezyjne B1, L1, azymut A12
ortodromy w punkcie P1 oraz długość ortodromy s są znane.
Rys. 5 Trójkąt elipsoidalny w metodzie Schreibera.
Szukamy
współrzędnych punktu P2 (B2, L2) i azymut
odwrotny A21. Zadanie polega na rozwiązaniu trójkąta elipsoidalnego
skonstruowanego w następujący sposób: z punktu P2 prowadzimy
ortodromę prostopadłą do południka punktu P1, która przecina ten
południk w punkcie P2’ (podobnie jak w metodzie Clarke’a).
Otrzymujemy w ten sposób mały trójkąt elipsoidalny P1P2P2’,
który możemy z dokładnością do wielkości małych rzędu e2*s*R3,
uważać za prostokątny trójkąt sferyczny o takich samych bokach s, v, u. Promień
kuli pomocniczej jest równy średniemu promieniowi krzywizny elipsoidy w punkcie
P1, tj. ![]() .
.
Tak wyznaczony
trójkąt sferyczny ma takie same boki jak i odpowiadający mu trójkąt
elipsoidalny. Nadmiary sumy kątów są sobie równe z dokładnością do e2*s*R3.
Ze wzoru:
![]() , [11]
, [11]
obliczymy
nadmiar sferyczny. Znając ![]() w trójkącie
sferycznym, a tym samym w trójkącie elipsoidalnym, możemy określić kąt
sferyczny
w trójkącie
sferycznym, a tym samym w trójkącie elipsoidalnym, możemy określić kąt
sferyczny ![]() , mianowicie:
, mianowicie:
![]() .
.
Obecnie możemy rozwiązać trójkąt sferyczny stosując
metodę Legendre’a, tj. rozwiązać go jako trójkąt płaski o następujących kątach;
![]() ,
, ![]() i
i ![]() .
.
Z twierdzenia sinusów trygonometrii płaskiej,
otrzymamy boki u i v trójkąta sferycznego (a tym samym elipsoidalnego). Z
powodu tego, że ![]() jest kątem małym
rzędu s*N2, możemy więc w przybliżeniu przyjąć
jest kątem małym
rzędu s*N2, możemy więc w przybliżeniu przyjąć ![]() . Korzystamy przy tym oczywiście z wcześniej otrzymanych
równań [10.]
. Korzystamy przy tym oczywiście z wcześniej otrzymanych
równań [10.]
Wobec tego będziemy mieli:
![]() ,
,
![]() .
.
Po rozwinięciu i uwzględnieniu, że:
![]() oraz
oraz ![]() i
i ![]()
otrzymamy:
![]() ,
,
![]() .
.
Gdy
wprowadzimy oznaczenia Schreibera x = s*cos A12 oraz y = s*sin A12
i uwzględnimy [11] otrzymamy:
 .
.
Według autora Schreiber na podstawie rozwinięcia
szeregów potęgowych na przenoszenie współrzędnych wyprowadził wzory na różnice
szerokości i długości geodezyjnej. Różnica szerokości geodezyjnej pomiędzy
punktami P1 i P2 jest równa:
![]() , [12]
, [12]
gdzie:
x = scos A12,
y = ssin A12,
![]() ,
,
M1, N1 –główne promienie
krzywizny,
![]() B’- różnica
szerokości geodezyjnej pomiędzy punktami P1 i P2,
B’- różnica
szerokości geodezyjnej pomiędzy punktami P1 i P2,
B1, B2 –
szerokości geodezyjne,
a – duża półoś elipsoidy,
e – pierwszy mimośród elipsoidy.
Różnica długości zaś, pomiędzy punktami P2’
i P2 (ponieważ punkty P1 i P2’ leżą na tym
samym południku, to ten sam wzór wyraża różnicę długości pomiędzy P1
i P2) określamy wzorem:
![]()
gdzie:
N’- przekrój poprzeczny w punkcie B2’.
Natomiast
różnica szerokości geodezyjnej pomiędzy punktami P2’ i P2
wyraża się wzorem:
![]() , [13]
, [13]
Odejmując
stronami od wzoru [12] wzór [13] otrzymamy wyrażenie na szukaną różnicę
szerokości geodezyjnej punktów P1 i P2. Mamy:
![]() ,
,
stąd
![]() .
.
Azymut
odwrotny A21 obliczymy z zależności :
![]() ,
,
gdzie:
![]() - zbieżność południków wyrażona wzorem:
- zbieżność południków wyrażona wzorem:
![]() .
.
Ostateczne
rozwiązanie wygląda następująco:
![]() ,
,
![]()
![]() .
.
2. Metody wykorzystujące szeregi potęgowe Legendre’a.
Polegają na rozwinięciu w szereg
Maclaurina różnic ![]() względem parametru
naturalnego, czyli długości linii geodezyjnej s.
względem parametru
naturalnego, czyli długości linii geodezyjnej s.
 [14]
[14]
Występujące
w tych wzorach pochodne wyższych rzędów względem ds wyznacza się przez
różniczkowanie równań pierwszego rzędu. Powolna zbieżność szeregów limituje ich
wykorzystanie do odległości nie przekraczających 150 kilometrów.”
Szczególnie
znaną i powszechnie stosowaną metodą przede wszystkim w przypadku dotyczącym
zadania odwrotnego, jest metoda średniej szerokości Gaussa. Według niej
wprowadza się do szeregów potęgowych Legendre’a punktu o szerokości Bm,
odpowiadającej punktowi usytuowanemu w połowie długości linii geodezyjnej s
pomiędzy punktami P1 i P2. Można tę metodę stosować dla
odległości do 200 kilometrów.
2.1. Metoda
średniej szerokości Gaussa - zadanie wprost
![]()
Początkowa
forma metody została opracowana w 1846 roku przez F.C. Gaussa. Z biegiem czasu
kilkakrotnie ją unowocześniano w celu rozszerzenia zakresu stosowalności dla
większych odległości i szerokości geograficznych. Jej użycie to nic innego niż
wykorzystaniu szeregów potęgowych Legendre’a ale nie w postaci [14], gdzie
pochodne względem parametru naturalnego s odnosi się do punktu początkowego P1
, lecz do pewnego pomocniczego punktu Pm usytuowanego w połowie
długości linii geodezyjnej.
Spłaszczenie
elipsoidy sprawia, że współrzędne punktu Pm i azymut linii w tym
punkcie są na ogół różne od wartości średnich.
![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
,
gdzie:
B – szerokość geodezyjna średnia,
L – długość geodezyjna średnia,
Bm, B1, B2
– szerokości geodezyjne odpowiednich punktów,
Lm, L1, L2
– długości geodezyjne odpowiednich punktów,
A1, A2 – azymuty.

Rys. 6 Pomocniczy punkt Gaussa w połowie długości s.
Rozwinięcie
różnic B2 - Bm i B1 – Bm w szereg
potęgowy według propozycji Gaussa przyjmie postać:
 , [15]
, [15]
 . [16]
. [16]
Wiedząc, że wzrost wartości parametru s ma
miejsce w kierunku od P1 do P2, przyrost s Pm P1
należy uznać za ujemny. Znaki ‘-‘ przy wyrazach
zawierających nieparzyste potęgi s są tego wynikiem. Wyrażenia analogiczne do [15], [16] moglibyśmy napisać dla L2-Lm i L1-Lm oraz dla A2-Am i A1-Am.
Tworząc
różnice równań [15] i [16] oraz analogicznych równań dla długości i azymutów
otrzymamy:
 ,
,
 , [17]
, [17]
 ,
,
gdzie:
s – długość linii geodezyjnej,
tworząc zaś sumy tych równań i
dzieląc je przez 2 otrzymamy:
 ,
,
 , [18]
, [18]
 .”
.”
Kiedy
spojrzymy na wzory [17] i porównamy je z wzorami [14], zauważymy, że wzory Gaussa zawierają tylko pochodne nieparzystego
rzędu. Wiemy zatem, że są prawie o połowę krótsze. Ponadto współczynniki przy
odpowiednich pochodnych w tych wzorach są mniejsze.
Podstawowy problem to wyznaczenie wartości pochodnych w
punkcie Pm, którego współrzędnych nie znamy. Z wzorów [18]
otrzymamy, że różnice B-Bm, L-Lm i A-Am to
wielkości małe drugiego rzędu względem B2-B1, L2-L1
i A2-A1. Toteż Gauss proponuje zastąpienie pochodnych w
punkcie Pm rozwinięciem w szereg Taylora w otoczeniu punktu p,
zachowując tylko wyrazy pierwszego rzędu w tym rozwinięciu. Czyli, że:![]()
![]() ,
,
![]() , [19]
, [19]
![]() .
.
Jeśli zróżniczkujemy wzory
![]() ,
, ![]() ,
, ![]() [20]
[20]
względem B i A, a wyniki
różniczkowania podstawimy do [19], pozostaną nam jeszcze Bm, Lm
i Am w różnicach (Bm-B), (Lm-L), (Am-A).
Zanim zastąpimy je wyrażeniami [20], dla których drugie pochodne powinny być
wyznaczone w punkcie Pm, zauważmy iż pomimo, że wyrażenia te są
wielkościami małymi drugiego rzędu, to zaniedbaliśmy w nich wyrazy czwartego
rzędu (wyrazy trzeciego rzędu wchodzą do wyrażeń [17]).
Wobec tego pochodne w [18]
wyznaczymy w punkcie P, tzn.:
i analogicznie dla L i A. W ten sam
sposób podejdziemy do pochodnych wyższych rzędów (trzeciego i piątego) w
punkcie Pm w wyrażeniach [17]. Obliczymy wartości tych pochodnych
dla szerokości, długości i azymutu. Będą one średnimi arytmetycznymi odpowiednich
wartości w punktach P1 i P2.
Widzimy,
że po wykonaniu opisanego różniczkowania, po podstawieniu wyników do wzorów
[19], a następnie podstawieniu tych wzorów do [17], po zastąpieniu w [17]
pochodnych wyższych rzędów w punkcie Pm pochodnymi w punkcie P,
otrzymamy wzór Gaussa dla różnic (B2-B1), (L2-L1)
i (A2-A1). W końcowych wzorach zachowano przede wszystkim
wyrazy małe czwartego rzędu, a także wyrazy zawierające ![]() , a nawet
, a nawet ![]() . Pozbyto się natomiast wyrazów, w których pojawiły się
. Pozbyto się natomiast wyrazów, w których pojawiły się![]() itd. Wzory takie stosuje się w przypadku s dochodzących do
200 km, otrzymując dokładność obliczeń 0,0001’’ dla szerokości i długości oraz
0,001’’ dla azymutu.
itd. Wzory takie stosuje się w przypadku s dochodzących do
200 km, otrzymując dokładność obliczeń 0,0001’’ dla szerokości i długości oraz
0,001’’ dla azymutu.
W
otrzymanych w ten sposób (na podstawie ogólnego zapisu [17]) wzorach
zastosowano następujące oznaczenia:
![]() ,
, ![]() ,
,
![]() ,
, ![]() ,
,
a także V przedstawione wzorem:
![]() .
.
Ostatecznie
wzory maja postać:
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() , [21]
, [21]
![]() .
.
W
przypadku, kiedy do rozwiązania jest zadanie wprost należy zastosować
postępowanie iteracyjne, gdyż po prawych stronach wzorów występują nieznane b i
l. Wystarczy wyjściową wartość tych wielkości pomierzyć na mapie topograficznej
(![]() ), aby po dwóch krokach iteracyjnych uzyskać wyniki z
zadowalającą dokładnością.
), aby po dwóch krokach iteracyjnych uzyskać wyniki z
zadowalającą dokładnością.
2.2. Metoda średniej szerokości Gaussa zadanie odwrotne.
Zadanie
odwrotne rozwiązujemy metodą Gaussa po ‘odwróceniu’ wzorów. Dokonujemy tego
następująco:
![]() ,
,
 . [22]
. [22]
Ze wzoru [22] obliczymy wartość ![]() , zaś korzystając z [21] obliczymy wartość różnicy azymutów
, zaś korzystając z [21] obliczymy wartość różnicy azymutów ![]() . Interesujące nas azymuty ‘wprost’ i ‘odwrotny’ będą się
wyrażały następująco:
. Interesujące nas azymuty ‘wprost’ i ‘odwrotny’ będą się
wyrażały następująco:
![]() .
.![]() ,
,
Metoda ta była najczęściej stosowana właśnie
do rozwiązania odwrotnego zadania geodezji wyższej.
Ostateczne
rozwiązanie:
![]() ,
,
![]() ,
, ![]() .
.
3. Metody bezpośrednie.
Polegają one na rozwiązaniu trójkąta elipsoidalnego a jego dwa punkty
są punktami początkowym i końcowym linii geodezyjnej P1 i P2,
natomiast punkt trzeci jest biegunem elipsoidy.
Rys. 7 Duży trójkąt geodezyjny i jego rzut na sferę
pomocniczą.
W metodach bezpośrednich stosowano
pomocniczą kulę o promieniu N1 lub a i środku w n1.
Punkty P1 i B rzutowano na tę kulę tak, aby niektóre elementy
trójkąta pozostały niezmienione. Aby uzyskać końcowe rozwiązanie zajmowano się
trójkątem sferycznym, a wyznaczone elementy przenoszono na elipsoidę. Jako
przykład służą metody Bessela z roku 1826 i Helmerta z roku 1880, w których
trójkąt P1P2B został odwzorowany na kulę o promieniu a
w taki sposób, aby szerokości zredukowane ![]() były równe
szerokościom na kuli. W odwzorowaniu azymutów zachowano wierność przez
wykorzystanie równania Clairauta dla linii geodezyjnej. Zniekształceniu ulegają
długość linii geodezyjnej s i różnica długości geodezyjnych
były równe
szerokościom na kuli. W odwzorowaniu azymutów zachowano wierność przez
wykorzystanie równania Clairauta dla linii geodezyjnej. Zniekształceniu ulegają
długość linii geodezyjnej s i różnica długości geodezyjnych ![]() . Różniczki pierwszego rzędu na kuli (względem długości
. Różniczki pierwszego rzędu na kuli (względem długości ![]() odpowiadającej s) odpowiednie do
odpowiadającej s) odpowiednie do
na elipsoidzie
przedstawiamy następująco
można je przekształcić do postaci:
Całkowanie powyższych równań prowadziłoby do całek
eliptycznych. Po rozwinięciu w szeregi, wykonaniu całkowania wyraz po wyrazie,
a następnie odwróceniu szeregów wyprowadzono wzory dla metody Bessela.
3.1. Metoda
Bessela zadanie wprost
Metoda
Bessela przenoszenia współrzędnych może być stosowana w stosunku do bardzo
dużych odległości dochodzących nawet do 20 tysięcy kilometrów. Wykonanie zadania
przeniesienia współrzędnych na podstawie tej metody polega na przeniesieniu
rozwiązania z elipsoidy o znanych parametrach na kulę o promieniu R = a,
wykorzystaniu szerokości zredukowanej u, rozwiązania zadania na kuli i
przeniesieniu wyników z powrotem na elipsoidę.
Pomiędzy
wielkościami na kuli i odpowiednimi do nich wielkościami na elipsoidzie mamy
następujące zależności:
![]()
![]()
![]()
![]()
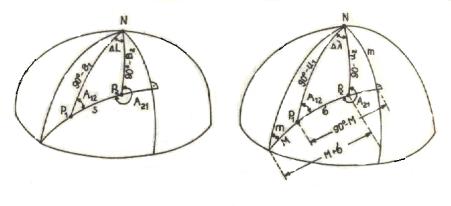
Rys. 8 Oznaczenia wielkości na elipsoidzie i na
odpowiadającej jej kuli.
Na rysunku przedstawiono zasadę przenoszenia współrzędnych na
elipsoidzie i na odpowiadającej jej kuli oraz oznaczenia występujących
wielkości.
W
celu rozwiązania zadania przenoszenia współrzędnych na kuli, należy uprzednio
obliczyć nieznane wartości ![]() i
i ![]() .
.
Na
elipsoidzie obrotowej o parametrach a, e2 dane są: współrzędne
geodezyjne punktu P1(B1,L1), azymut linii
geodezyjnej A12 z punktu P1 na P2 oraz
odległość s między nimi.
Obliczane
wielkości to współrzędne geodezyjne punktu P2(B2,L2)
oraz azymut A21 z punktu P2 na P1.
Kolejność
rozwiązywania takiego zadania przedstawia się następująco:
a) Przelicza się szerokość
geodezyjną na szerokość zredukowaną (B1 na u1)
![]() ,
,
b) oblicza się też
odległość na kuli między pozycją P1 i P2
![]()
gdzie:


c)
oblicza się azymut odwrotny A21
![]() ,
,
d)
oblicza się szerokość zredukowaną u2
![]() ,
,
e)
zamienia się szerokość zredukowaną na szerokość geodezyjną B2
![]() ,
,
f)
oblicz się wartość ![]()
![]() ,
,
g)
oblicza się wartość ![]()
![]() ,
,
gdzie:
![]()
![]()
![]() .
.
h)
oblicza się wartość L2
![]()
W wyniku takiego
postępowania otrzymamy:
B2, L2,
A21
3.2. Metoda
Bessela zadanie odwrotne
Na
elipsoidzie obrotowej o parametrach a, e2 mamy dane współrzędne
geodezyjne punktu P1(B1,L1) oraz punktu P2(B2,L2).
Obliczyć musimy długość linii geodezyjnej s oraz jej azymuty w punkcie P1
i P2, czyli azymuty wprost A12 oraz odwrotny A21.
Kolejność
wykonywania zadania wygląda następująco:
a)
Przeliczamy szerokość
geodezyjną B1 i B2 na szerokość zredukowaną u1
i u2
![]() ,
,
![]() ,
,
gdzie:
e – pierwszy mimośród elipsoidy,
b)
obliczamy różnicę
długości, szerokości oraz szerokość średnią,
c)
obliczamy różnicę
długości na kuli ![]() (pierwsze
przybliżenie)
(pierwsze
przybliżenie)
![]()
gdzie:
![]()
![]()
![]()
Dokładne wartości ![]() dla dużych
odległości (powyżej 1000 km) liczymy
wykorzystując uprzednie przybliżenie
dla dużych
odległości (powyżej 1000 km) liczymy
wykorzystując uprzednie przybliżenie ![]() oraz
oraz ![]()
![]() - współczynniki, które zostały już
przedstawione w schemacie rozwiązania zadania wprost
- współczynniki, które zostały już
przedstawione w schemacie rozwiązania zadania wprost
![]()
![]()
![]()
Ostateczną wartość ![]() wyliczymy
wyliczymy
![]()
gdzie:
![]()
![]()

Następnie wyliczamy
![]()
lub z uprzedniego wzoru
![]()
d)
obliczamy azymut wprost
A12 i azymut odwrotny A21 linii geodezyjnej
![]()
![]()
e)
obliczamy też długość
linii geodezyjnej s
![]()
gdzie:
![]()
![]()
![]()
A, B, C, -
przedstawiono w schemacie rozwiązania zadania wprost.
W wyniku takiego postępowania
otrzymamy:
![]() .
.
4. Metody wykorzystujące cięciwy elipsoidy.
4.1. Metoda Mołodeńskiego
M. S. Mołodeński zaproponował obliczanie współrzędnych za
pomocą cięciw elipsoidy. Niekonwencjonalne, trójwymiarowe podejście
Mołodeńskiego wymagało nowych definicji podstawowych wielkości geodezyjnych.
Odległością s12 dwóch punktów na elipsoidzie nazywa Mołodeński
długość odcinka prostej-cięciwy elipsoidy przechodzącej przez te punkty.
Azymutem geodezyjnym cięciwy (A12) autor metody nazywa kąt
dwuścienny, jaki tworzy płaszczyzna południka geodezyjnego punktu P1
z płaszczyzną wertykalną tego punktu zawierającą cięciwę P1P2.
Mołodeński posługuje się także odległością zenitalną cięciwy. W konsekwencji
tych definicji autor traktuje trójkąty płaskie utworzone z cięciw
elipsoidalnych jako trójkąty geodezyjne nowego typu.
Rozwiązanie
zadań wprost i odwrotnego według Mołodeńskiego polega na rozwiązaniu trójkątów
sferycznych Z1Z2B i Z1BK, przy czym K jest
śladem cięciwy P1P2 na sferze o promieniu jednostkowym
zatoczonej w punkcie P1.
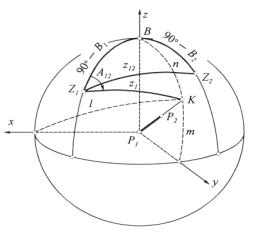
Rys. 9. Kula jednostkowa w
punkcie P1 objaśniająca metodę Mołodeńskiego.
j, l, H
- współrzędne geograficzne punktu w starym układzie,
jk, lk, Hk – współrzędne geograficzne punktu w nowym układzie po przeniesieniu współrzędnych.
Dj” = ![]() [-DX sinj cosl - DY sinj sinl + DZ cosj + aDf + fsin2jDa]
[-DX sinj cosl - DY sinj sinl + DZ cosj + aDf + fsin2jDa]
Dl” = - ![]() (DX sinl + DY cosl)
(DX sinl + DY cosl)
ρ’’- 206264,806246- wartość radiana wyrażona w
sekundach,
j, l, H
- współrzędne geograficzne punktu,
Dj, Dl, DH
- poprawki
dla dokonania transformacji ze starego układu odniesienia do nowego układu
odniesienia,
DX, DY, DZ - poprawki współrzędnych
prostokątnych przestrzennych,
a - duża półoś
elipsoidy lokalnej,
b - mała
półoś elipsoidy lokalnej,
f=![]() - spłaszczenie elipsoidy lokalnej,
- spłaszczenie elipsoidy lokalnej,
Da, - różnica wartości dużych osi
elipsoidy,
Df - różnice
spłaszczeń elipsoid,
e - pierwszy
mimośród elipsy południkowej:
e2 = ![]() ,
,
N - promień krzywizny pierwszego
wertykału:
![]() ,
,
M - promień
krzywizny południka:
![]() .
.
Wszystkie wartości D powstają poprzez odjęcie
wartości parametrów starej elipsoidy od wartości parametrów elipsoidy nowej.
Bibliografia:
1.
Banachowicz
A. Urbański J., „Obliczenia nawigacyjne”, Akademia Marynarki Wojennej, Gdynia,
1987.
2.
Baran W., „Teoretyczne podstawy opracowania
wyników pomiarów geodezyjnych”, Warszawa, 1990.
- Czarnecki K. „Geodezja współczesna w zarysie”, Gdynia, 1999.
- Felski A., Urbański J., „Uwzględnianie wpływu układu odniesienia
na współrzędne pozycji”, Gdynia 1984.
5.
Górski
S., „Ocena dokładności w nawigacji morskiej”, Gdańsk, 1977.
6.
Gucma
S., „Podstawy teorii linii pozycyjnych i dokładności w nawigacji morskiej”,
Wyższa Szkoła Morska, Szczecin, 1995.
7.
Stateczny
A, Urbański J., Kantak, „Podstawy automatyzacji nawigacji. Część A”, Wyższa
Szkoła Morska, Gdynia, 1988.
8.
Urbański
J., Czapczyk M., „Podstawy kartografii i geodezji nawigacyjnej”, Wyższa Szkoła
Morska, Gdynia, 1988.
9.
Urbański
J., Januszewski J., „Podstawy nawigacji satelitarnej”, Wyższa Szkoła Morska,
Gdynia, 1992.