2.Odwzorowanie
Gaussa-Krűgera.
3.Odwzorowanie quasi-stereograficzne
Wybrane odwzorowania kartograficzne
Na początek kilka słów wstępu......
Mapy (w tym morskie)
umożliwiają nam spojrzeć na całą ziemię, jednocześnie pozwalają stworzyć
szczegółowy obraz jej części (basen portowy). Termin mapa pochodzi od łacińskiego
słowa mappa, które oznaczało zmniejszone, uogólnione przedstawianie na
powierzchni płaszczyzny całości lub fragmentu powierzchni ziemi.
Kartografia jest to nauka dotycząca sporządzania, powielania i o wykorzystaniu map. Definicja Brytyjskiego Towarzystwa Kartograficznego z 1964 podaje, że jest to nie tylko nauka i technologia, ale też sztuka sporządzania map oraz ich badanie jako dokumentów naukowych, a także dzieł sztuki.
Klaudiusz Ptolemeusz, w II w.p.n.e., jako pierwszy podjął się kartograficznemu przedstawieniu Ziemi. Jednakże dopiero na początku XX w., kartografię zaczęto traktować jako samodzielną naukę, a nie jak wcześniej dział geodezji.
Poważnym krokiem naprzód w rozwoju kartografii wywarła fotogrametria lotnicza.
Zarówno rzuty jak i odwzorowania kartograficzne, są sposobami przedstawienia Ziemi w taki sposób, aby każdemu punktowi na naszym globie odpowiadał punkt na mapie.
Konstrukcja rzutów oparta jest na działaniach matematycznych, które określają zależności pomiędzy współrzędnymi geograficznymi punktów na powierzchni Ziem (traktowanej jako obrotowa elipsoida), a współrzędnymi płaskimi x i y obrazu tego punktu w przyjętym odwzorowaniu.
Mimo rozwoju techniki nie ma odwzorowania, w którym byłyby wyeliminowane wszystkie zniekształcenia. Każde z nich zawiera zniekształcenia długości, kątów bądź powierzchni.
Odwzorowanie kartograficzne polega na przeniesieniu położenia punktów z powierzchni odniesienia (powierzchni kuli lub elipsoidy ziemskiej) na płaszczyznę mapy z zastosowaniem określonych reguł matematycznych. Praktycznie jest to przeniesienie siatki geograficznej, która jest podstawą określania położenia punktów na Ziemi.
Siatkę kartograficzną tworzy się z obrazu siatki geograficznej przedstawionej na mapie z zachowaniem reguł odwzorowania. Podstawą do otrzymania siatki kartograficznej są przeliczenia matematyczne określające miejsca przecięcia się odpowiednich południków i równoleżników, bądź rzutowanie geometryczne siatki geograficznej na płaszczyznę, ewentualnie walec lub stożek. Jeżeli dany punkt zrzucimy na płaszczyznę uzyskamy jeden punkt, jeżeli na walec lub stożek jedną linię, które odwzorowują się wiernie bez zniekształceń kartograficznych. Wynika to z tego, iż kulistej powierzchni nie można rozwinąć na płaszczyznę bez rozerwania jej ciągłości i bez zniekształceń.
Skala mapy i rodzaj odwzorowania, położenia obszaru w stosunku do punktu lub linii stycznej są bezpośrednimi czynnikami wpływającymi na wielkość i charakter zniekształceń. Widzimy to wyraźnie porównując siatkę kartograficzną i geograficzną. Poprzez wykorzystanie działań matematycznych obrazy siatki geograficznej i kartograficznej są zbieżne. Pomimo różnic wizualnych, na mapie możemy dokonywać pomiarów i określać położenie geograficzne punktów, a przebieg równoleżników i południków na mapie wiernie odwzorowują główne kierunki.
Istnieje wielka różnorodność odwzorowań kartograficznych, które posiadają zarówno swoje pozytywne jak i negatywne cechy, które wynikają głównie z występowania zniekształceń kartograficznych.
W żadnym z odwzorowań nie można uzyskać wiernego przedstawienia odległości na całej mapie. Możliwe jest to tylko wzdłuż pewnych kierunków i takie odwzorowanie nazywa się wiernoodległościowym. Natomiast niektóre z odwzorowań mają taki rozkład zniekształceń odległości, że przedstawione są w nich wiernie kąty (kierunki) – są to odwzorowania wiernokątne – lub pola powierzchni figur – odwzorowania wiernopowierzchniowe.
Istnieją jeszcze odwzorowania dowolne – są to takie, które nie zachowują ani wierności kątów, ani powierzchni, ani też odległości. Siatki klasyczne, są to takie, które można skonstruować przez rzutowania geometryczne. Ze względu na to, na jaką powierzchnię rzutuje się siatkę kartograficzną, wyróżnia się odwzorowania i siatki kartograficzne: azymutalne, walcowe i stożkowe, które przedstawione są poniżej.
Źródło promieni rzutujących może znajdować się w różnej pozycji w stosunku do punktu styczności płaszczyzny – w środku kuli (rzut gnomoniczny), na antypodach punktu styczności (rzut stereograficzny) lub w nieskończoności (rzut ortograficzny).Wyróżniamy trzy położenia siatki kartograficznej: położenie normalne, poprzeczne i ukośne. Zależy to od położenia punktu lub linii styczności płaszczyzny lub figury na kuli ziemskiej. W położeniu normalnym osie stożka i walca są zgodne z osią biegunową Ziemi, a płaszczyzna jest prostopadła do osi obrotu Ziemi. Gdy osie stożka lub walca są zgodne z jedną z osi równika, a punkt styczności płaszczyzny jest położony na równiku, mamy wtedy do czynienia z odwzorowaniem poprzecznym. Inaczej jest w odwzorowaniu ukośnym, położenie osi walca oraz punktu styczności jest pośrednie - pomiędzy biegunami a równikiem.
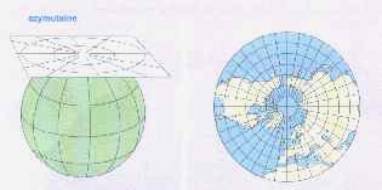
. Rys. 1. Odwzorowanie azymutalne
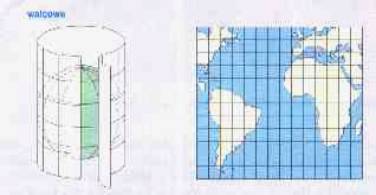
Rys.
2. Odwzorowanie
walcowe
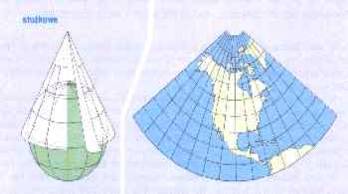
Rys.
3. Odwzorowanie stożkowe
Poniżej przedstawiono wszystkie trzy
powyższe odwzorowania czyli, azymutalne , walcowe i stożkowe w odwzorowaniu
ukośnym i poprzecznym.
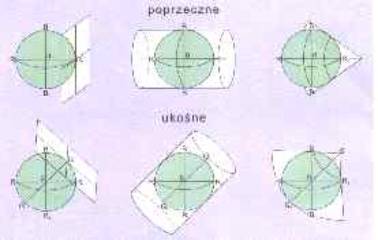
Rys. 4. Odwzorowanie poprzeczne i ukośne
W
celu zmniejszenia zniekształceń stosuje się również rzutowanie na powierzchnie
sieczne..w..stosunku..do..kuli.
Zastosowana kombinacja rodzaju powierzchni rzutowania, położenia źródła
promieni rzutujących i punktu (linii) styczności staje się odrębnym
odwzorowaniem. Decyduje o kształcie południków i równoleżników, odległościach i
kątach pomiędzy nimi, a więc o charakterze i rozkładzie zniekształceń na mapie.
W siatce płaszczyznowej, w normalnym położeniu, południki odwzorowane są jako proste, które rozchodzą się od bieguna w sposób promienisty natomiast równoleżniki w postaci współśrodkowych okręgów. Odległości między równoleżnikami zależą od położenia źródła promieni rzutujących.
W siatkach walcowych, w położeniu normalnym, południki i równoleżniki są liniami prostymi i tworzą sieć prostokątów. Istotne tutaj jest, że odległości pomiędzy południkami są rzeczywiste tylko na równiku (zgodnie ze skalą mapy) W odróżnieniu od siatki geograficznej, odległości między południkami pozostają takie same na całym arkuszu mapy.
W siatce stożkowej, w położeniu normalnym, rozwinięty stożek ma kształt wycinka koła. Południki zbiegają się we wspólnym punkcie, który zazwyczaj nie jest przedstawiony na mapie (najczęściej bieguny). Południki ukazane są jako linie proste, równoleżniki z kolei jako współśrodkowe łuki.
Odwzorowanie wybieramy w zależności od obszaru i zakresu wykorzystania danej mapy. Jeżeli planujemy podróż oceaniczną, wybieramy mapę o małej skali z odwzorowaniem o bardzo małych zniekształceniach odległości. Jeżeli uprawiamy żeglugę przybrzeżną lub na małych odległościach, wybieramy mapy wiernokątne i wiernopowierzchniowe, pamiętając o zniekształceniach odległości..
1.Odwzorowanie Merkatora
Podstawowym odwzorowaniem kartograficznym stosowanym do opracowania map nawigacyjnych jest normalne wiernokątne odwzorowanie walcowe, zwane powszechnie odwzorowania Merkatora. Zostało ono wstępnie opracowane w 1569 roku przez flamendzkiego kartografa Gerharda Kremera (1512—1594) zwanego po łacinie Merkatorem, twórcy nowoczesnej kartografii. W 1569 wydał mapę świata w opracowanym przez siebie rzucie, zwanym rzutem Merkatora. Wprowadził pojęcie atlasu - nazwał tak zbiór map, który wydał w latach 1585-1595.
Odwzorowanie to, w późniejszych latach było modyfikowane przez E.Wrighte’a i J.Gregory’ego.
W odwzorowaniu Merkatora teoretyczny walec styka się z powierzchnią kuli wzdłuż równika. Charakterystyczne w tym odwzorowaniu jest to że, południki przecinają się z równoleżnikami pod stałym kątem, przy czym odległości między południkami są stałe i proporcjonalne do odpowiednich im różnic długości geograficznych na powierzchni elipsoidy (kuli). Występuje tu podstawowe założenie wiernokątności, czyli siatka kartograficzna normalnego odwzorowania walcowego jest siatką prostokątną, a pola powierzchni zwiększane są coraz to bardziej w miarę wzrostu szerokości geograficznej, przez co ma ono niewielkie zastosowanie poza nawigacją.

Rys.
5. Siatka
kartograficzna w normalnym odwzorowaniu walcowym
Przy takim odwzorowaniu, loksodroma (linia łącząca dwa dowolne punkty znajdujące się na płaszczyźnie tego odwzorowania) jest linią prostą, która przecina południki pod jednakowym kątem. Natomiast ortodroma jest tu krzywą wygiętą w kierunku bieguna (krótszy łuk koła wielkiego). Koło wielkie na mapie Merkatora jest krzywą sinusoidalną, którą w połowie jest na N, a w połowie na S – wygięta jest po prostu w kierunku bliższego bieguna.
Rys. 6 Koło wielkie na mapie Merkatora
Funkcje normalnego odwzorowania
walcowego dla walca stycznego mają postać;
![]()
gdzie:
a- stały współczynnik równy dłuższej półosi elipsoidy ziemskiej
Pierwsze z wyrażeń, czyli X=f(φ) jest równaniem równoleżników, natomiast wyrażenie Y=aλ to równanie południków. Skale wzdłuż południków (m) oraz wzdłuż równoleżników (n) ustala się z zależności takich jak:
gdzie:
dx – różniczka współrzędnych prostokątnych
dφ – przyrost szerokości geograficznej
a – duża półoś elipsoidy
N – promień przekroju pierwszego wertykału
M – promień krzywizny przekroju południowego
Aby odwzorowanie spełniało warunek wiernokątności musi występować zależność:
m=n
, czyli ![]()
Na podstawie równań południkowych i równoleżnikowych oraz przy uwzględnieniu powyższej zależności otrzymuje się:
z tego wynika, że funkcje odwzorowawcze przyjmują postać:

Przy odwzorowaniu Merkatora należałoby wspomnieć o powiększonej szerokości. Definicja powiększonej szerokości mówi, że jest to odległość na mapie w odwzorowaniu Merkatora od równika do równoleżnika żądanej szerokości geograficznej φ, wyrażana w minutach długości geograficznej.
W kartografii nawigacyjnej wartość funkcji X oznacza się poprzez V i nazywa się ją powiększoną szerokością oraz przedstawia się następującym wzorem:
Podstawiając wzory na M i N otrzymujemy:
Przy obliczaniu siatki
kartograficznej tegoż odwzorowania należy rozwiązać jedno z dwóch zadań.
Pierwsze zadanie polega na obliczeniu siatki kartograficznej rejonu, którego
granice są dokładnie określone równoleżnikami ![]() i
i ![]() oraz południkami
oraz południkami ![]() i
i ![]() Drugie zadanie polega
na obliczeniu siatki kartograficznej, którego granice są określane w
przybliżeniu, ale ściśle oznaczona jest skala mapy.
Drugie zadanie polega
na obliczeniu siatki kartograficznej, którego granice są określane w
przybliżeniu, ale ściśle oznaczona jest skala mapy.
Przy rozwiązywaniu każdego z powyższych zadań należy uwzględnić, wartości: szerokość i długość mapy. Jeżeli znany jest wewnętrzny wymiar arkusza mapy, to, aby rozwiązując pierwsze zadanie należy określić skalę mapy, która umożliwi przedstawienie wybranego obszaru powierzchni Ziemi na arkuszu o ustalonych wymiarach. Przy rozwiązywaniu drugiego zadania określa się równoleżniki i południki ograniczające rejon, który ma być przedstawiony na mapie w żądanej skali. Obliczając powiększoną szerokość w minutach długości geograficznej otrzymuje się jednakowe jednostki miary dla równoleżnikowej i południkowej ramki mapy.
Jednostką mapy nazywa się długość
liniowa jednej minuty długości geograficznej na mapie w odwzorowaniu Merkatora,
wyrażona w milimetrach. Jest ona uzależniona od skali mapy oraz od szerokości
geograficznej równoleżnika podstawowego. Jednostką mapy rozpoczyna się
obliczenie siatki kartograficznej. Jeżeli równoleżnikiem podstawowym jest
równik i skalę główną mapy na nim oznaczy się jako 1:![]() , wówczas jednostkę mapy oblicza się ze wzoru:
, wówczas jednostkę mapy oblicza się ze wzoru:
![]()
gdzie:
a – długość półosi rówikowej elipsoidy ziemskiej;
![]() - mianownik
skali mapy;
- mianownik
skali mapy;
![]() - wartość
jednego radiana wyrażona w minutach
- wartość
jednego radiana wyrażona w minutach
Jeżeli 1:![]() jest skalą główną na równoleżniku podstawowym
jest skalą główną na równoleżniku podstawowym ![]() , to jednostkę mapy oblicza się ze wzoru:
, to jednostkę mapy oblicza się ze wzoru:
lub
 (2.10)
(2.10)
gdzie:
ρ’ – wartośc jednego radiana wyrażona w minutach
Ze względu na zachowanie wiernokątności w tym odwzorowaniu nie może być ono używane na obszarach podbiegunowych. Spowodowane jest to tym, że w tych rejonach dochodzi do bardzo dużego powiększenia powierzchnii (bieguny odwzorowują się w nieskończoności).
Odwzorowanie Merkatora spowodowało przełom w nawigacji. Dzięki wiernokątności prowadzenie żeglugi według wskazań kompasu magnetycznego i żyrokompasu jest dużo łatwiejsze. Dodatkowym walorem jest zmienna skala odległości, która jest równoznaczna z kątową skalą szerokości geograficznej zamieszczoną na lewej i prawej ramce mapy.
2.Odwzorowanie Gaussa-Krűgera.
Odwzorowanie Gaussa-Krügera (jego angielski odpowiednik to Transverse Mercator Projection) jest to wiernokątne walcowe poprzeczne odwzorowanie elipsoidy. W tym odwzorowaniu, w celu jego zinterpretowania należy wyobrazić sobie walec styczny do elipsoidy na całej długości południka środkowego lub osiowego odwzorowania. Aby odwzorowanie było prawidłowe musi spełnić warunki takie jak:
wiernokątności,
prostoliniowości
izometryczności odwzorowania południka środkowego przy założeniu początku układu kartograficznego w punkcie przecięcia obrazu południka osiowego z obrazem równika.
Obraz południka jest osią odciętych zaś
obraz równika jest osią rzędnych układu kartograficznego. Najbardziej efektywna
metoda w/w warunków sprowadza się do trzech podstawowych etapów:
I. wiernokątne odwzorowanie całej powierzchni elipsoidy na całą sferę
II wiernokątne – walcowe – poprzeczne odwzorowanie sfery na płaszczyznę-odwzorowanie poprzeczne Merkatora
III wiernokątne przekształcenie płaszczyzny Merkatora na płaszczyznę Gaussa-Krügera, tak, aby był spełniony warunek odwzorowania dotyczący izometryczności południka środkowego.
Powyższe etapy przedstawia również
poniższy rysunek.
Rys.
7 Schemat geometryczny realizacji
odwzorowania Gaussa-Krügera
Gdybyśmy przyjęli, że Ziemia jest kulą a nie elipsoidą, cały problem sprowadzałby się do etapu drugiego a odwzorowanie Gaussa-Krügera i odwzorowanie poprzeczne Mercatora byłyby identyczne. Ogólny algorytm odwzorowania Gaussa-Krügera można zapisać następująco:
Wzory te również obejmują przekształcenia odwrotne:
gdzie:
B , L – współrzędne geodezyjne punktu
φ i λ – odpowiadające współrzędne na sferze, przy czym λ =
L
λo = Lo – długość geodezyjna południka środkowego w odwzorowaniu UTM,
pokrywająca się z długością południka środkowego odwzorowania Gaussa-Krügera
XMERC, YMERC – współrzędne odwzorowania UTM
XGK, YGK – współrzędne odwzorowania Gaussa-Krügera
Rys. 8. Pas południkowy na powierzchni elipsoidy ziemskiej i na płaszczyźnie
w odwzorowaniu Gaussa-Krügera
W odwzorowaniu Gaussa-Krügera obszar Ziemi należy podzielić na odpowiednie pasy południkowe, ponieważ obszaru całej powierzchni lub znacznej części elipsoidy nie można odwzorować bez dużych zniekształceń. Każdy z tych podziałów stanowi oddzielny układ współrzędnych prostokątnych płaskich. Szerokości pasów ustalone są tak, ażeby każdy z nich można było odwzorować na płaszczyznę (tj. przedstawić na mapie) bez praktycznie odczuwalnych zniekształceń, które nie przekraczałyby stopnia dokładności map. W tym celu powierzchnie elipsoidy obrotowej dzieli się, począwszy od zerowego południka Greenwich, na 60 pasów południkowych po 6º każdy lub 120 pasów po 3º każdy. Południk środkowy w każdym pasie nazywamy południkiem osiowym; dzieli on pas na dwie równe części: zachodnią i wschodnią.
Teoretycznie biorąc, mapy w odwzorowaniu Gaussa-Krügera są obarczone zniekształceniami długości i mają w różnych punktach mapy niejednakową skalę. Mimo to zniekształcenia te są tak małe, że skalę mapy w obrębie jednego arkusza można uważać za stałą. Najczęściej stosowane są pasy południkowe 3º i 6º długości geograficznej. Pasy 3-stopniowe obejmują mniejsze obszary, zapewniają uzyskanie mniejszych zniekształceń, co jest szczególnie ważne dla triangulacji, gdyż zniekształcenia na styku dwóch układów wynoszą zaledwie 17 cm na 1000 m. Pasy 6-stopniowe długości geograficznej mają tę zaletę, że pozwalają odwzorować obszar dwa razy większy niż pasy 3-stopniowe, zmniejszając do połowy liczbę styków siatek kilometrowych, jak również zmniejszają liczbę ewentualnych źródeł błędów przy najzupełniej wystarczającej dokładności liniowej. W Polsce osnowa geodezyjna ze względu na potrzebę dokładności jest wykonywana w pasach 3-stopniowych, a mapy - w pasach 6-stopniowych. Odwzorowanie to można traktować jako rozwinięcie poprzecznego odwzorowania Merkatora przez zastąpienie powierzchni kuli powierzchnią elipsoidy obrotowej.
Z tego względu odwzorowanie Gaussa-Krűgera jest nazywane odwzorowaniem walcowym poprzecznym równokątnym powierzchni elipsoidy obrotowej.
W tabeli nr 2.1. przedstawione są wzory dla elipsoidy GRS-80 oraz dla
elipsoidy Krassowskiego. Tabela nr 2.2. przedstawia niezbędne parametry obu
tych elipsoid. Wynika z niej, że w
ostatnim etapie przekształcenia „wprost” oraz w pierwszym etapie
przekształcenia odwrotnego stosowany jest wielomian zmiennej zespolonej. Aby
wykonać procedurę odwzorowawczą należy zadać długość geodezyjną Lo południka
środkowego. Pozostałe procedury odwzorowawcze określa geometria danej
elipsoidy.
Wzory w odwzorowaniu „wprost” wyrażają się bezpośrednio za pomocą znanych
funkcji elementarnych i przestępnych. W odwzorowaniu odwrotnym należy
zastosować szereg trygonometryczny, wielkość Lo oznacza taki promień, której
długość południka idealnie odpowiada długości elipsy.
ODWZOROWANIE GAUSSA-KRŰGERA (B,ΔL)↔(XGK,YGK),
ΔL=L-L0
Tabela
1. Wzory dla elipsoidy GRS-80 i elipsoidy Krassowskiego
|
ALGORYTM..PRZEKSZTALCENIA
„WPROST” (B,ΔL)→(XGK,YGK) |
ALGORYTM..PRZEKSZTAŁCENIA
”ODWROTNEGO” (XGK,YGK)→(B,ΔL) |
|
I Lagrange’a (B,ΔL)→(φ,Δλ) |
III’
(φ,Δλ)→(B,ΔL) |
|
U=1-e*sin(B), V=1+e*sin(B) K=(U/V) (л=3,141592653589793) φ=2*arctg(C)-л/2 Δλ=ΔL
(przyrost względem L0) m1=R0*cos(φ)/[Rn*cos(B)], γ1=0 |
B=φ+c2*sin(2*φ)+c4*sin(4*φ)+c6*sin(6*φ) ΔL=Δλ |
|
II Merkatora (φΔλ)→(XMERC,YMERC) |
II’ (XMERC,YMERC)→(φ,Δλ) |
|
p=sin(φ), q=cos(φ)*cos(Δλ) r=1+cos(φ)*sin(Δλ) s=1-cos(φ)*sin(Δλ) XMERC=R0*arctg(p/q) YMERC=0,5*R0*In(r/s) m2=1/[r*s] |
α=XMERC/R0, β=YMERC/R0 w=2*arctg[exp(β)]-π/2 φ=arcsin[cos(w)*sin(α)] Δλ=arctg[tg(w)/cos(α)] |
|
III (XMERC,YMERC)→(XGK,YGK) |
I’ (XGK,YGK)→(XMERC,YMERC) |
|
Z=[(XMERC-xo)*s, YMERC*s] ZGK=a0+Z(a1+Z(a2+Z(a3+Z(a4+ +Z(a5+Za6))))) ZGK=(XGK,YGK) m3= γ3=-arctg(f |
Z=[(XGK-a0)*s, YGK*s] ZMERC=b0+Z(b1+Z(b2+Z(b3+Z(b4+ +Z(b5+Zb6))))) ZMERC=(XMERC,YMERC) |
ODWZOROWANIE..GAUSSA-KRŰGERA.– PARAMETRY..PROCEDUR
[Zastosowanie wielomianów
dopuszczalne dla:B od 48º do 56º i L od-6º do+6º]
Tabela 2. Parametry elipsoidy GRS-80 i elipsoidy Krassowskiego
|
PROCEDURA OBJAŚNIENIE |
PARAMETR NAZWA |
ELIPSOIDA GRS-80 |
KRASOWSKIEGO |
|
(B,Δλ)→(φ,Δλ)→(XMERC,YMERC) |
|
|
|
|
- pierwszymimośród elipsoidy |
e |
0,0818191910428 |
0,0818133340169 |
|
- półosie elipsoidy |
a |
6378137 |
6378245 |
|
|
b |
6356752,31414 |
6356863,01877 |
|
- spłaszczenie |
f |
1:298,257222101 |
1:298,3 |
|
- promień sfery Lagrange’a |
R0 |
6367449,14577 |
6367558,496875 |
|
(XMERC,YMERC)→(XGK,YGK) |
|
|
|
|
- parametr normujący |
s |
2,0E-6 |
2,0E-6 |
|
- parametr centrujący |
x0 |
5760000 |
5760000 |
|
- współczynniki wielomianu |
ao |
5765181,11148097 |
5765180,4975833 |
|
|
a1 |
499800,81713800 |
499800,87112376 |
|
|
a2 |
-63,81145283 |
-63,80172299 |
|
|
a3 |
0,83537915 |
0,835512434 |
|
|
a4 |
0,13046891 |
0,13044472 |
|
|
a5 |
-0,00111138 |
-0,00111100 |
|
|
a6 |
-0,00010504 |
-0,00010501 |
|
(XGK,YGK)→(XMERC.YMERC) |
|
|
|
|
- parametr normujący |
s |
2,0E-6 |
2,0E-6 |
|
- parametr centrujący |
x0’=a0 |
5765181,11148097 |
5765180,4975833 |
|
- współczynniki wielomianu |
b0 |
5760000 |
5760000 |
|
|
b1 |
500199,26224125 |
500199,20821246 |
|
|
b2 |
63,88777449 |
63,87801231 |
|
|
b3 |
-0,82039170 |
-0,82014111 |
|
|
b4 |
-0,13125817 |
-0,13123362 |
|
|
b5 |
0,00101782 |
-0,00101747 |
|
|
b6 |
0,00010778 |
0,00010775 |
|
(φ,Δλ)→(B,Δλ) |
|
|
|
|
-współczynniki szeregu
trygonometrycznego |
c2 |
0,0033565514856 |
0,0033560696018 |
|
|
c4 |
0,0000065718731 |
0,0000065699863 |
|
|
c6 |
0,0000000176466 |
0,0000000176390 |
|
|
c8 |
0,0000000000540 |
0,0000000000540 |
Odwzorowanie Gaussa-Krügera sprowadzono ostatecznie do dwukierunkowo
działającej formuły:
(B , ∆L) ó (XGK, YGK),
przy czym ∆L = L – Lo
Parametrem lokalizującym odwzorowania Gaussa-Krügera jest długość
geodezyjna południka środkowego oznaczona jako Lo.
Na przykładzie rysunku 9. wynika, że:
odcięta XGK jest mierzona względem obrazu równika jako osi Oy płaskiego
układu,
rzędna YGK względem obrazu południka środkowego jako osi Ox tegoż układu.
Rys. 9 Ogólna
zasada aplikacji odwzorowania Gaussa-Krügera
Objaśnienia do powyższego rysunku
![]() - układ
współrzędnych Gaussa-Krügera
- układ
współrzędnych Gaussa-Krügera
OXY- układ aplikacyjny
![]()
mo – skala podobieństwa
![]() - składowe
przesunięcia
- składowe
przesunięcia
Wielkość mo zwana skalą
na południku środkowym, pełni równocześnie funkcję skali prawdopodobieństwa
konkretnej aplikacji względem oryginalnego odwzorowania Gaussa-Krügera.
Jeśli mo <1 to
parametr ten ma na celu równomierne rozłożenie bezwzględnych wartości
zniekształceń liniowych odwzorowania. Parametr przesunięcia układu
współrzędnych oznaczone xo i yo mają zasadniczo dwa cele:
- w przypadku yo chodzi o to, aby
zapobiec występowaniu ujemnych wartości rzędnych lub szczególne wyróżnienie
danej strefy układu
- w przypadku xo odcięcie dużych wartości XGK
Aplikacje tego odwzorowania dla układów 1942, 1965- strefa 5, 1992
przedstawia tabela nr 3.
Dla układu UTM aplikacja odwzorowania Gaussa-Krügera jest analogiczna jak w
przypadku układu 1942 z przedziałem na pasy 6º. Różnica polega jednak na odmienności
przyjętych elipsoid odniesienia i skali mo a także na sposobach
konstruowania współrzędnych pełnych.
Tabela.3. Aplikacje odwzorowania Gaussa-Krűgera
|
APLIKACJE ODWZOROWANIA GAUSSA-KRŰGERA Wzory ogólne: Xukład
aplikacyjny=m0*xGK+x0 Yukład aplikacyjny=m0*yGK+y0 |
||||
|
UKŁAD STREFA |
ELIPSOIDA |
PARAMETRY STAŁE |
||
|
|
|
m0 |
x0 |
y0 |
|
1942/15(6) 1942/21(6) 1942/15(3) 1942/18(3) 1942/21(3) 1942/24(3) 1965-STREFA5 |
KRASSOWSKIEGO |
1,0 1,0 1,0 1,0 1,0 1,0 0,999983 |
0 0 0 0 0 0 -4700000 |
3500000 4500000 5500000 6500000 7500000 8500000 237000 |
|
1992 2000/15 2000/18 2000/21 2000/24 UTM/33 UTM/34 |
GRS-80
(WGS-84) |
0,9993 0,999923 0,999923 0,999923 0,999923 0,9996 0,9996 |
-5300000 0 0 0 0 0 0 |
500000 5500000 6500000 7500000 8500000 500000*) 500000*) |
|
*)
*/33 */34 oznaczają strefy Polskie układu UTM według numerów słupów podziałowych
międzynarodowej mapy świata; w nomenklaturze wojskowej (NATO-wskiej) i
nawigacyjnej, zamiast współrzędnych
pełnych w układzie UTM stosuje się specjalną systematykę alfanumeryczną
określania pozycji. W aplikacjach dla
potrzeb cywilnych w Polsce stosuje się również współrzędne pełne konstruowane
analogicznie jak w układach strefowych 1942/15(6), 1942/21(6) . Podobna zasadę przyjęto w programach
aplikacyjnych TRANSPOL i GEONET_unitrans . |
||||
Przed II Wojną Światową w Polsce używane było odwzorowanie Gaussa-Krügera w pasach dwustopniowych. Tworzyły one układy:
1 poznański o długości geodezyjnej południka osiowego 17°,
2 łęczycki o długości geodezyjnej południka osiowego 19°,
3 warszawski o długości geodezyjnej południka osiowego 21°,
4 lubelski o długości geodezyjnej południka osiowego 23°,
5 wileński o długości geodezyjnej południka osiowego 25°.
Powierzchnią odniesienia była elipsoida Bessela styczna do powierzchni geoidy w punkcie Borowa Góra.
Odwzorowanie Gaussa-Krügera do prac kartograficznych stosowane nie było. Władze wojskowe do odwzorowań dla celów wojskowych stosowały odwzorowanie quasi-stereograficzne Roussilhea.
Po II wojnie dla robót geodezyjnych oraz dla opracowania mapy gospodarczej kraju przyjęto odwzorowanie Gaussa-Krügera z podziałem obszaru państwa na pasy trzystopniowe z założeniem, że skala liniowa w każdym południku osiowym wynosiła 0.999935.
Pasy trzystopniowe tworzyły układy:
1 układ szczeciński o długości geodezyjnej południka osiowego 15°,
2 układ bydgoski o długości geodezyjnej południka osiowego 18°,
3 układ warszawski o długości geodezyjnej południka osiowego 21°,
4 układ białostocki o długości geodezyjnej południka osiowego 24°.
Powierzchnią odniesienia jest elipsoida Krassowskiego styczna do powierzchni geoidy w punkcie Pułkowo.
Rys. 10. Podział układu „1965” na strefy
3.Odwzorowanie quasi-stereograficzne
Odwzorowanie quasi-stereograficzne WIG (Wojskowego Instytutu Geograficznego) jest równokątnym, azymutalnym odwzorowaniem powierzchni elipsoidy obrotowej na płaszczyznę. Odpowiada ono stereograficznemu odwzorowaniu kuli , w którym występują zniekształcenia kątów.
Rys. 11. Punkt główny element
lokacyjny odwzorowania quasi-stereograficznego
W odwzorowaniu
quasi-stereograficznym należy określić sferę styczną do płaszczyzny elipsoidy w
punkcie głównym, (![]() ) który jest przyłożeniem płaszczyny odwzorowania zwanym
również elementem lokacyjnym. Promień Rs jest równy średniemu promieniowi
krzywizny elipsoidy w tym punkcie głównym. Od punktu głównego
) który jest przyłożeniem płaszczyny odwzorowania zwanym
również elementem lokacyjnym. Promień Rs jest równy średniemu promieniowi
krzywizny elipsoidy w tym punkcie głównym. Od punktu głównego ![]() do danego punktu B
rozciągamy dowolny łuk południka środkowego
do danego punktu B
rozciągamy dowolny łuk południka środkowego ![]() mierzonego na elipsoidzie. Następnie stosując rzut
stereograficzny rzutujemy ze sfery na płaszczyznę ten łuk.(środek rzutów leży w
odległości
mierzonego na elipsoidzie. Następnie stosując rzut
stereograficzny rzutujemy ze sfery na płaszczyznę ten łuk.(środek rzutów leży w
odległości ![]() od punktu głównego).
od punktu głównego).
Rys.
12. Zasada
odwzorowania południka środkowego
Jest to zaledwie przekształcenie łuku południka środkowego (przechodzącego przez punkt główny) w odciętą osi ox układu kartezjańskiego. Aby jednak odwzorowanie to było w pełni zrealizowane należy spełnić jedynie warunek wiernokątności. Odwzorowanie łuku południka środkowego wyraża zależność następującej postaci:
![]()
![]() ; (2.13)
; (2.13) ![]() ;
;
![]() ;
;
gdzie:
promienie krzywizny w punkcie głównym:
![]() - średni,
- średni,
![]() - w przekroju południkowym
- w przekroju południkowym
![]() - w przekroju poprzecznym, tj. pierwszego wertykału
- w przekroju poprzecznym, tj. pierwszego wertykału
a, e - półoś równika i mimośród elipsoidy
Przy założeniu, że istnieje
równolegle odwzorowanie Gaussa-Krügera z południkiem środkowym Lo przechodzącym
przez punkt główny, łuk ![]() wyraża się w
postaci różnicy odciętych
wyraża się w
postaci różnicy odciętych![]()
gdzie:
s![]() oznacza długość łuku południka od równika do punktu
głównego. Wierniokątność obu odwzorowań sprawia, że powyższe zależności
uogólniają się do postaci zespolonej, wyrażającej wzajemne przekształcenie
płaszczyzn obu odwzorowań co przedstawia rysunek poniżej
oznacza długość łuku południka od równika do punktu
głównego. Wierniokątność obu odwzorowań sprawia, że powyższe zależności
uogólniają się do postaci zespolonej, wyrażającej wzajemne przekształcenie
płaszczyzn obu odwzorowań co przedstawia rysunek poniżej
W=tg(w) (2.16)
gdzie:
w = (u,
v) , u = (xGK - so) / (2× RS) ,
v = yGK / (2× RS)
W = (U, V) , U = x
/ (2× RS ), V = y / (2× RS),
gdzie:
tg oznacza funkcję tangensa zespolonego;
xGK , xGK - współrzędne punktu w
odwzorowaniu Gaussa- Krügera,
x, y - współrzędne w odwzorowaniu quasi-stereograficznym (środek układu pokrywa się z odwzorowanym punktem głównym). Z powyższych zależności wynika, że znając wzory odwzorowania Gaussa-Krügera możemy zrealizować odwzorowanie quasi-stereograficzne, (xGK , yGK) Þ (x , y), poprzez zależność W=tg(w) Dla konkretnej aplikacji uwzględniamy ponadto: przyjętą skalę podobieństwa m0 , mnożąc przez nią współrzędne x , y oraz parametry przesunięcia (X0 , Y0):
X = m0
· x + X0) Y = m0
· y + Y0 ,
Rys. 13 Ilustracja
przekształcenia pomiędzy płaszczyznami odwzorowawczymi
Z zależności W=tg(w) wynika zespolona zależność odwrotna, która ma postać:
w=arctg (W), (2.19)
która definiuje odwrotne odwzorowanie quasi-stereograficzne w stosunku do odwzorowania Gaussa-Krügera.
Odwzorowanie quasi-stereograficzne jest szczególnie przydatne do przedstawiania obszarów, których granice mają kształt regularny, zbliżony do okręgu leżących w szerokościach umiarkowanych. Punkt główny odwzorowania powinien znajdować się w pobliżu punktu środkowego odwzorowywanego obszaru. Południk przechodzący przez punkt główny nazywany jest południkiem środkowym. Południk środkowy odwzorowuje się jako odcinek linii prostej.
Odwzorowanie tego typu było
stosowane na mapach wojskowych w Polsce przed II Wojną Światową. Jest to
odwzorowanie elipsoidy na płaszczyznę najlepiej pasuje do obszarów zbliżonych
kształtem do kwadratu. W Polsce po wojnie zastosowano tego typu odwzorowanie
przy tworzeniu układu współrzędnych GUGIK 80. Układ ten wprowadzono w celu
opracowania map w skalach 1:25 000 i mniejszych pokrywających cały obszar
kraju. W odwzorowaniu punktem głównym jest punkt o współrzędnych B![]() = 52º 1O’,
= 52º 1O’,
L![]() = 19° 10’.
= 19° 10’.
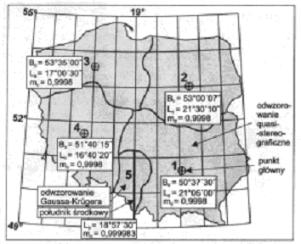
Przykładowe dane do aplikacji w układzie „1965” oraz „GUGIK-80” przedstawione są w poniższej tabeli.
STREFA 1 ![]()
![]() º
37’30’’
º
37’30’’ ![]() =21º05’00’’
=21º05’00’’ ![]() =0,9998
=0,9998
![]() =5467000,000m
=5467000,000m
![]() = 4637000,000m
= 4637000,000m
![]() = 6382390,1649837m
= 6382390,1649837m
![]() = 5610467,5770417m
= 5610467,5770417m
STREFA 2 ![]()
![]() º
00’07’’
º
00’07’’ ![]() =21º30’10’’
=21º30’10’’ ![]() =0,9998
=0,9998
![]() =5806000,000m
=5806000,000m
![]() = 4603000,000m
= 4603000,000m
![]() = 6384119,4273046m
= 6384119,4273046m
![]() = 5874939,8741150m
= 5874939,8741150m
STREFA 3 ![]()
![]() º
35’00’’
º
35’00’’ ![]() =17º00’30’’
=17º00’30’’ ![]() =0,9998
=0,9998
![]() =5999000,000m
=5999000,000m
![]() = 3501000,000m
= 3501000,000m
![]() = 6384536,7935655m
= 6384536,7935655m
![]() = 5939644,7701117m
= 5939644,7701117m
STREFA 4![]()
![]() º
40’15’’
º
40’15’’ ![]() =16º40’20’’
=16º40’20’’ ![]() =0,9998
=0,9998
![]() =5627000,000m
=5627000,000m
![]() = 43703000,000m
= 43703000,000m
![]() = 6383155,1651299m
= 6383155,1651299m
![]() = 5726819,6678288m
= 5726819,6678288m
UKŁAD „ GUGIK-80’’ (parametry odwzorowania quasi-stereograficznego)
![]() º 10’00’’
º 10’00’’ ![]() =19º10’00’’
=19º10’00’’ ![]() =0,9997142857
=0,9997142857
![]() =50000,000m
=50000,000m
![]() = 50000,000m
= 50000,000m
![]() = 6383515,6754446 m
= 6383515,6754446 m
![]() = 5781989,9020447m
= 5781989,9020447m
gdzie:
![]() - współrzędne geodezyjne punktu głównego,
- współrzędne geodezyjne punktu głównego,
![]() - współrzędne płaskie punktu głównego,
- współrzędne płaskie punktu głównego,
![]() - średni
promień krzywizny powierzchni elipsoidy w punkcie głównym,
- średni
promień krzywizny powierzchni elipsoidy w punkcie głównym,
![]() -
długość łuku południka elipsoidy od równika do punktu głównego strefy,
-
długość łuku południka elipsoidy od równika do punktu głównego strefy,
![]() - skala długości w punkcie głównym.
- skala długości w punkcie głównym.
Uwaga dotycząca układu GUGiK-80: przy faktycznej realizacji układu dla map topograficznych w skalach 1:100000 dokonano dodatkowej (zamierzonej) translacji układu o kilkadziesiąt metrów. Dokładne wielkości składowych tej translacji nie są jednak odnotowane w dostępnych zasobach archiwalnych.