Algorytmy transformacji współrzędnych
Ogólne zasady transformacji współrzędnych
Bezpośrednia metoda przeliczania współrzędnych
Transformacja współrzędnych kartezjańskich
Transformacja za pomocą wzorów Mołodienskiego
Algorytmy transformacji współrzędnych
Zagadnienie transformowania
współrzędnych pomiędzy różnymi układami odniesienia nabrało szczególnego
znaczenia wraz z rozpowszechnianiem satelitarnego systemu nawigacyjnego.
Problem ten staje się istotny również przy wyznaczaniu granic na morzu, a w
związku z tym pojawiania się kontrowersji dotyczących ewentualnych naruszeń
określonych akwenów, np. rybołówczych czy terytorialnych.
Dawniej pozycję wyznaczano metodami graficznymi
w oparciu o znaki nawigacyjne zaznaczone na tej samej mapie. W związku z tym
problem zmiany układu odniesienia mógł wystąpić tylko w momencie zmiany mapy.
Kiedy pojawiły się odbiorniki systemu TRANSIT okazało się, że znaki nawigacyjne
w stosunku, do których dokonywano pomiarów nie są zaznaczone na mapie, a
wyznaczanie pozycji na ich podstawie dokonuje się analitycznie w komputerze.
Dopiero na przełomie lat 80-tych pojawiły się na mapach brytyjskich informacje
o stosowanym układzie odniesienia. Rozpoczęto wtedy również zamieszczanie
informacji o wartościach poprawek, jakie należy uwzględnić przy nanoszeniu na
taką mapę pozycji określonej systemem satelitarnym.
We współczesnej praktyce powszechnie stosowanym w systemach GPS jest układ odniesienia WGS 84. Spotykamy się jednak ze stosowaniem różnych układów odniesienia dla danych mapy. W związku z tym należy oczekiwać, że współrzędne tych samych punktów nie będą wyrażały się takimi samymi wartościami. Zatem stosowanie różnych układów odniesienia wywołuje pewne błędy, które w danym miejscu mają charakter błędów systematycznych, a zależą od różnic w rozmiarach i kształcie stosowanych elipsoid oraz wzajemnego usytuowania tychże elipsoid. W rezultacie w procesie obliczeń należy uwzględnić procedury transformowania współrzędnych do wspólnego układu odniesienia, przy czym wspólny może być jeden ze stosowanych układów lub zupełnie inny.
Zatem różnice współrzędnych wywołane różnymi układami odniesienia są porównywalne ze zwykłymi błędami określania pozycji. Tak więc problem transformacji współrzędnych jest powszechnie znany i spotykany zarówno przy pomiarach satelitarnych jak i przy wykorzystaniu systemów naziemnych.
Ogólne zasady transformacji współrzędnych
Na rysunku poniżej przedstawiony jest schemat ilustrujący różnice między pojęciami układ odniesienia i układ współrzędnych. Kolumny oznaczają na nim różne układy odniesienia, natomiast wiersze różne sposoby tworzenia układu współrzędnych. W nawigacji najczęściej mamy do czynienia z przypadkiem współrzędnych φA , λA lub φB , λB .Dla nawigatora oznacza to, że niezależnie, jaką mapą się on posługuje to pozycja będzie opisana tymi właśnie wartościami. Zatem warto wspomnieć o tym, że nie wolno przenosić pozycji z mapy na mapę w oparciu o współrzędne. Może to być dopuszczalne tylko i wyłącznie, gdy jesteśmy pewni, że obie mapy zostały wykonane w oparciu o ten sam układ odniesienia. W dzisiejszych czasach nowej technologii nie trzeba się martwić o tego typu sprawy, gdyż większość map wykonana jest w oparciu o układ WGS 84, jednak na niektórych obszarach na świecie istnieją jeszcze mapy oparte o lokalny, czy też regionalny układ odniesienia.
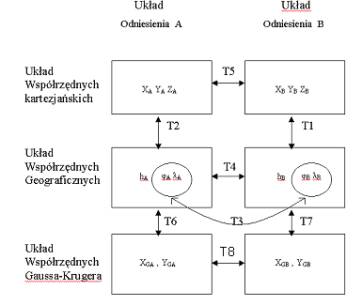
Rys. Schemat zależności
pomiędzy różnymi układami współrzędnych i różnymi układami odniesienia
Strzałki opisane literami T1.....T8.
Oznaczają transformację współrzędnych.
Transformacje
to metody zamiany jednych współrzędnych na inne, np. geodezyjne na płaskie
Gaussa – Krugera. Transformowanie T6 oraz T7 jest jednym z
najpowszechniejszych. Strzałki poziome na schemacie oznaczają transformacje
współrzędnych tego samego rodzaju pomiędzy różnymi układami odniesienia.
Najważniejsze transformacje to T3 i T4 pomiędzy współrzędnymi geograficznymi
wyrażanymi w różnych układach odniesienia.
Warto tutaj również przytoczyć schemat przedstawiający ścieżki przejść
transformacyjnych pomiędzy różnymi układami stosowanymi w obszarze Polski. Schemat wskazuje przede wszystkim,
że aby przeliczyć współrzędne z układów dawnych (jako odwzorowań elipsoidy
Krasowskiego) do układów nowych (powstałych z elipsoidy GRS-80 lub WGS-84) lub
odwrotnie, należy przejść przez współrzędne globalne obu systemów
elipsoidalnych, tj. współrzędne kartezjańskie - geocentryczne XYZ lub
geodezyjne BLH. Nie ma takiej potrzeby, jeśli problem przeliczeniowy dotyczy
układów kartograficznych tej samej elipsoidy.
Rys. Schemat bezpośrednich
przejść transformacyjnych pomiędzy układami współrzędnych
Przeliczenie
współrzędnych pomiędzy dwoma dowolnymi układami wymienionymi na schemacie
powinno być w zasadzie złożeniem przekształceń elementarnych, które wskazują
linie łączące. Poprzez analityczne lub numeryczne złożenie operacji można
oczywiście uzyskać wzory innych przejść transformacyjnych. Przejście pomiędzy
elipsoidami może być realizowane poprzez współrzędne kartezjańskie X,Y,Z
(metoda podstawowa), jak też poprzez współrzędne geodezyjne B,L,H (po
uwzględnieniu matematycznych zależności pomiędzy B,L,H i X,Y,Z).
Transformacja
współrzędnych dzieli się na transformacje 3-parametrową oraz 7-parametrową.
Transformacja siedmio-parametrowa jest bardziej ścisłą metodą, gdzie parametry
muszą wskazywać na przemianę miejscowych współrzędnych danego układu
odniesienia do współrzędnych układu WGS 84.
Dla wielu typowych aplikacji GIS-u
można zmienić znak każdego z siedmiu parametrów, by otrzymać odwrotność, choć
nie zawsze ta technika jest dokładna.
Parametrami transformacji są:
a)
Delta X – przesunięcie względem osi X. Wartość ta musi być
podawana w metrach a kierunek translacji podawany jest przez znak wartości.
b)
Delta Y – przesunięcie względem Y. Wartość ta musi być podawana
w metrach a kierunek translacji podawany jest przez znak wartości.
c)
Delta Z - przesunięcie względem Z. Wartość ta musi być
podawana w metrach a kierunek translacji podawany jest przez znak wartości.
d)
Rotacja X – rotacja wokół osi X. Wartość ta jest podawana w
sekundach, a kierunek rotacji jest wskazany przez znak wartości.
e)
Rotacja Y – rotacja
wokół osi Y. Wartość ta jest podawana w sekundach, a kierunek rotacji jest
wskazany przez znak wartości.
f)
Rotacja Z – rotacja
wokół osi Z. Wartość ta jest podawana w sekundach, a kierunek rotacji jest
wskazany przez znak wartości.
g)
Skala – współczynnik skalowania. Wartość podawana jest w
częściach na milion(ppm) i jest różnicą aktualnego współczynnika skalowania i
jednostek.
Na rysunkach poniższych przedstawione są parametry
transformacji zarówno 3-parametrowej (a) jak i 7-parametrowej(b).
Rys. - parametry
transformacji 3-parametrowej
Rys. parametry transformacji
7-parametrowej
Bezpośrednia metoda przeliczania współrzędnych
Metoda
bezpośrednia jest jedną z najbardziej popularnych metod transformacji
współrzędnych i polega na zamianie współrzędnych geograficznych punktu P
(φ, λ, h) na współrzędne geograficzne w innym układzie odniesienia
(środek układu znajduje się tutaj w środku elipsoidy, oś z pokrywa się z osią
obrotu elipsoidy, natomiast płaszczyzna X, Y, Z płaszczyzną równika.
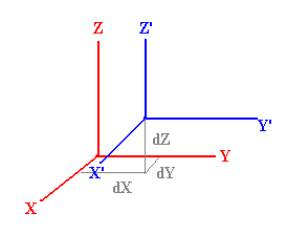
Współrzędne prostokątne X, Y, Z punktu
P wyrażone w geocentrycznym układzie odniesienia, przy przeliczeniu ich na
współrzędne prostokątne w układzie lokalnym XL, YL, ZL
Rys. Przesunięcie układu
lokalnego i globalnego o wektor ro
będą różniły się o wartość poprawek dX,
dY, dZ, opisujących wektor ro. Układu współrzędnych prostokątnych
przestrzennych nie stosujemy w celu opisywania pozycji w nawigacji, jednak aby
wykorzystać tą metodę musimy zamienić współrzędne geograficzne punktu wyrażone
w geocentrycznym układzie odniesienia współrzędnych φ, λ, h na
przestrzenne współrzędne prostokątne X, Y, Z w tym samym układzie.
W tym celu należy skorzystać z poniższych zależności:
gdzie:
X, Y, Z –współrzędne prostokątne przestrzenne punktu P
N – promień przekroju pierwszego wertykału, ![]()
e2 – kwadrat
pierwszego mimośrodu ![]()
Jednakże wartości wektora r0 nie
są identyczne, a wręcz przeciwnie różnią się dla każdego układu odniesienia, co
przedstawia poniższa tabela:
Tab. Wartości poprawek dla
niektórych układów odniesienia w stosunku do WGS 72
|
Nazwa układu odniesienia |
Wartości niektórych
przestrzennych współrzędnych prostokątnych w stosunku do układu WGS 72 |
||
|
Dx [m] |
Dy [m] |
Dz [m] |
|
|
Australijski (AND) |
-122 |
-41 |
146 |
|
Europejski (ED-50) |
-84 |
-103 |
-127 |
|
Północnoamerykański (NAD
27) |
-22 |
157 |
176 |
|
Południowoamerykański ( SAD
69) |
-77 |
3 |
45 |
Współrzędne prostokątne przestrzenne układu
lokalnego można zamienić na współrzędne geograficzne w tym układzie
odniesienia. W tym celu posłużymy się następującymi wzorami:
Na początku wyznaczymy długość:
![]()
a następnie pierwsze
przybliżenie szerokości φo:
![]()
Następnie obliczamy kolejne
przybliżenia szerokości φ:
oraz wysokości H, którą
możemy obliczyć za pomocą wzorów:

lub:
a także
![]()
Obliczenia
przybliżeń φi i Hi zakończą się po przekroczeniu
założonej dokładności ![]() ε , np. ε = 10-7 rad, a więc gdy
zachodzi nierówność:
ε , np. ε = 10-7 rad, a więc gdy
zachodzi nierówność:
![]() oraz
oraz
![]()
gdzie:
a – duża półoś elipsy
Innym sposobem transformacji
współrzędnych przestrzennych ortokartezjańskich jest tak zwana metoda
numeryczna, czyli przeliczanie x, y, z na B, L ,H dla dowolnych wartości H.
„Numeryczność” tej metody polega na tym, że mnożniki Lagrange’a tworzą równanie
czwartego stopnia, które rozwiązywane jest numerycznie.
W nawigacji morskiej mamy do czynienia
z problemem transformacji współrzędnych punktów, których odległość od
powierzchni elipsoidy waha się w granicach od –100 do +100 metrów.
Metodę numeryczną będę rozpatrywał
dokładnie w punktach, przytaczając kilka przypadków, zaczynając od najbardziej
błahych. Przyjmijmy, że P (xo, yo, zo) jest
ustalonym punktem w układzie współrzędnych ortokartezjańskich, którego początek
pokrywa się ze środkiem elipsoidy o półosiach a i b.
Na początku rozpatrzmy kilka łatwych przykładów:
1.
Punkt P ma współrzędne
(0,0,0). Zatem będzie pokrywał się on z początkiem układu współrzędnych i
posiada dwa równoprawne rzuty ortogonalne na powierzchnię elipsoidy, tzw.
Bieguny.
2.
Punkt P ma współrzędne(xo,
0,0) zatem leży na osi Ox, a jego współrzędne geodezyjne są równe:
B = 0º
L = 0o, gdy xo > 0
L = 180º , gdy xo < 0
![]()
![]()
3.
Punkt P ma współrzędne
(0, y0 ,0). Leży on wtedy na osi Oy, a jego współrzędne geodezyjne
wynoszą:
B = 0º
L = 90º , gdy yo > 0
L = -90º , gdy yo < 0
![]()
4.
Punkt P ma współrzędne
(0,0, zo), zatem leży na płaszczyźnie osi Oz:
B = 90º , gdy zo > 0
B = -90º , gdy zo < 0
L - jest nieokreślona
![]()
5.
Punkt P ma współrzędne
(xo, yo, 0), zatem leży na płaszczyźnie Oxy.
B = 0º
![]()
![]()
6.
Punkt P ma współrzędne
(xo, 0, zo) i leży na płaszczyźnie Oxz:
L = 0o, gdy xo > 0
L = 180º , gdy xo < 0
B oraz H będziemy obliczali tak jak w n/w punkcie 8.
7.
Punkt P ma współrzędne
(0, yo, zo), więc leży na płaszczyźnie Oyz:
L = 90º , gdy yo > 0
L = -90º , gdy yo < 0
B oraz H będziemy obliczali tak jak w n/w punkcie 8.
8.
Punkt P ma współrzędne
(xo, yo, zo) , wszystkie różne od zera. W tym
przypadku będą rozpatrywane trzy różne sytuacje:
a) punkt P leży na powierzchni
elipsoidy, czyli jest punktem tzw. Elipsoidy południkowej, zatem H=0, a
pozostałe współrzędne są równe:
![]()
gdzie: ![]()
![]()
b)
punkt P jest punktem zewnętrznym elipsoidy, tzn. H > 0, co przedstawia
poniższy rysunek:
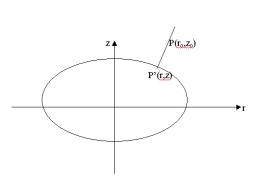
Rys. przedstawienie punku
zewnętrznego na elipsoidzie
c) punkt P leży we wnętrzu elipsoidy, czyli H < 0
Współrzędna L będzie obliczana w
przypadkach b i c tak jak w przypadku 8a, natomiast trudniejszą sprawą jest
tutaj obliczenie współrzędnych B i H.
Aby obliczyć szerokość geodezyjną B
potrzebujemy najpierw rozpatrzyć elipsoidę południkową o równaniu:
![]()
zakładamy, że a > b > 0, zatem musimy znaleźć
taki punkt P’ (r, z) na elipsie E, dla którego spełniony będzie warunek:
![]()
czyli minimalnej odległości od punktu P
do P’ na elipsoidzie ziemskiej.
Problem ten będziemy rozwiązywać za pomocą mnożników
Lagrange’a. Potrzebne nam będzie do tego określenie dwóch następujących
funkcji:
![]()
![]()
stąd otrzymujemy:

gdzie:
λo , λ1 – mnożniki Lagrange’a
Za pomocą twierdzenia Fermata
wyznaczymy ekstremum w/w wzoru, zatem musi być spełniony warunek istnienia
ekstremum dwóch zmiennych:
![]()
![]()
jednak warunek ten będzie spełniony gdy
zajdą poniższe równości:
![]()
![]()
Nie możemy jednak przyjąć zależności, że r = z =0,
dlatego λo![]() 0.
0.
Można założyć, że λo=1, wtedy w/w
zależności przyjmą postać:
![]()
![]()
Z tych zależności otrzymamy, że
współrzędne punktu P’ na elipsie E w funkcji λ1 są równe:
![]()

Podstawiając to do wzoru /11/ otrzymamy postać funkcji
zmiennej λ1:
po przekształceniu otrzymamy następujące równanie
czwartego stopnia względem λ1:
![]()
gdzie:
![]()
![]()
![]()
![]()
Powyższe równanie możemy rozwiązać
numerycznie z dowolną dokładnością. Otrzymamy wtedy max. cztery różne wartości
λ1 , które po podstawieniu do wzorów /21/ i /22/ dadzą taką
samą ilość wartości r i z.
Z kolei dla tych par musimy znaleźć
minimalną wartość funkcji fo wzór /13/.
Wysokość elipsoidalną obliczamy jako
pierwiastek z minimalnej wartości fo, tj.
![]()
Ponieważ współrzędne punktu P’ i jego
wysokość jest równa zero(H’=0), to szerokość geodezyjna tego punktu, a co za
tym idzie także punkt P, będzie równa:
![]()
Pozostałe współrzędne obliczmy według
wcześniej podanych wzorów, w zależności od tego którego przypadku dotyczą.
W nawigacji morskiej mamy zazwyczaj do
czynienia z przypadkami 8b i 8c, zatem wykorzystywać będziemy wzory /8/, /24/,
/25/.
Przedstawiona wyżej metoda jest metodą
ogólną i może być wykorzystywana do transformacji punktów o dowolnej odległości
od elipsoidy.
Trzecim sposobem zamiany współrzędnych
przestrzennych na geodezyjne, jest tzw. metoda przybliżona. W metodzie tej
podam zależności które zostały wyprowadzone w oparciu o współrzędne punktu C
(rys.) będącego środkiem okręgu stycznego do elipsy południkowej w punkcie P’.
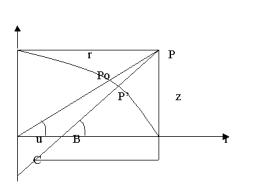
Rys.
Współrzędne punktów na elipsoidzie
Współrzędne tego punktu wynoszą:
![]()
![]()
gdzie: u – jest to szerokość zredukowana punktu P
![]()
Z rysunku widać, że (przy założeniu, że znamy
współrzędne punktu C):
![]()
Jako, że współrzędne punktu C są
wartościami przybliżonymi, powyższy wzór również taki jest. Błąd szerokości B
zależny jest od wysokości punktu H. Jednak dla wysokości spotykanych w
nawigacji morskiej błąd szerokości obliczony powyższym wzorem nie przekracza 10-7
sekundy kątowej.
Inną przybliżoną zależność na
obliczanie szerokości geodezyjnej punktu można uzyskać za znanego związku
pomiędzy szerokością geodezyjną i szerokością geocentryczną punktu leżącego na
elipsoidzie:
![]()
gdzie: ψ- szerokość geocentryczna
![]()
Z rysunku możemy zapisać pewną zależność:
![]()
Przekształcając powyższe wzory otrzymujemy:
![]()
zależność ta jest prawdziwa dla punktów
leżących na elipsoidzie, zatem H = 0.
Zatem można to przedstawić w innej
postaci:
Transformacja przestrzennych
współrzędnych kartezjańskich na współrzędne geodezyjne możliwa jest metodą
iteracyjną, przybliżoną a także numeryczną.
Ta ostatnia metoda zazwyczaj nie jest
używana w praktyce ze względu na równanie czwartego stopnia. Wzory iteracyjne
zapewniają wymaganą dokładność obliczeń.
Najkorzystniejsze dla celów
nawigacyjnych są zależności przybliżone.
Metoda Bowringa
Metoda ta polega na transformacji
współrzędnych geograficznych (geodezyjnych) na nowe współrzędne
geograficzne(geodezyjne), przy pomocy współrzędnych ortokartezjańskich.
Transformacja odbywa się w trzech kolejnych etapach:
1)
Transformacja
współrzędnych geograficznych (geodezyjnych) j, l i H
na ortokartezjańskie X, Y, Z:
gdzie:
![]()
a – duża półoś elipsoidy ziemskiej
b – mała półoś elipsoidy
e – pierwszy mimośród elipsoidy ziemskiej
N – promień pierwszego wertykału
DX, DY, DZ – przyrost współrzędnych względem WGS-84, a pozostałymi układami
eX, eY, eZ – skręcenie względem osi x, y, z
2) Transformacja ze współrzędnych ortokartezjańskich X, Y, Z na nowe ortokartezjańskie XNEW, YNEW, ZNEW dla układu odniesienia, na który przeliczamy:

gdzie:
DX, DY, DZ – przyrost współrzędnych względem WGS-84, a pozostałymi układami
eX, eY, eZ – skręcenie względem osi x, y, z
3)
Przeliczanie ze współrzędnych ortokartezjańskich XNEW, YNEW,
ZNEW na geograficzne
(geodezyjne) jNEW,
lNEW,
HNEW (do obliczeń w tej części wykorzystuje się wartości a, b, e2, e’2, N dla nowego układu odniesienia):
![]()
![]()
![]()
gdzie:
![]()
![]()
![]()
![]()
![]()
a – duża półoś elipsoidy ziemskiej
b – mała półoś elipsoidy
e – pierwszy mimośród elipsoidy ziemskiej
e’ – drugi mimośród elipsoidy ziemskiej
N – promień pierwszego wertykału
Transformacja współrzędnych kartezjańskich
Jest
to transformacja trójwymiarowa przez podobieństwo, zdefiniowana jednoznacznie
przez 7 parametrów, tj. trzy składowe przesunięcia wzajemnego środków elipsoid,
trzy kąty obrotów osi jednego układu względem drugiego oraz jeden parametr
zmiany skali. Zadanie to realizują wzory praktyczne (podane stałe są funkcjami
siedmiu geometrycznych parametrów przekształcenia):
Przejście z elipsoidy WGS 84 na elipsoidę
Krasowskiego:
(XYZ)w Þ (XYZ)k
XK= XW + C11*XW
+ C12*YW + C13*ZW + TX
YK= YW + C21*XW
+ C22*YW + C23*ZW + TY
ZK= ZW + C31*XW
+ C32*YW + C33*ZW + TZ
gdzie:
TX = - 33.4297 m
TY = + 146.5746 m
TZ = + 76.2865 m
C11 = + 0.84076440*10-6
C21 = - 4.08960650*10-6
C31 = - 0.25614618*10-6
C12 = + 4.08960694*10-6
C22 = + 0.84076292*10-6
C32 = + 1.73888682*10-6
C13 = + 0.25613907*10-6
C23 = - 1.73888787*10-6
C33 = + 0.84077125*10-6
Przejście z elipsoidy Krasowskiego na elipsoidę WGS
84:
(XYZ)k Þ (XYZ)w
XW= X + D11*X
+ D12*Y + D13*Z
YW= Y + D21*X
+ D22*Y + D23*Z
ZW= Z + D31*X
+ D32*Y + D33*Z
gdzie:
X = XK – TX
Y = YK – TY
Z = ZK – TZ
D11 = - 0.84078048*10-6
D21 = + 4.08960007*10-6
D31 = + 0.25613864*10-6
D12 = - 4.08959962*10-6
D22 = - 0.84078196*10-6
D32 = - 1.73888494*10-6
D13 = - 0.25614575*10-6
D23 = + 1.73888389*10-6
D33 = - 0.84077363*10-6
Transformacja za pomocą wzorów Mołodienskiego
Metoda
ta jest metodą tzw. trzy parametrową, gdzie wzory będą wykorzystywane na
określenie poprawek Δφ, Δλ, Δh, o które należy
poprawić współrzędne pozycji (φ, λ, h), przechodząc do innego układu
odniesienia.
Wzory zostały opracowane na podstawie
poniższych zależności:
jednak przy założeniu, że oba układy
odniesienia są wzajemnie równoległe, ich środki są przesunięte o wektor
ΔR, a jeden z układów jest układem geocentrycznym.
Poprawki Δφ, Δλ,
Δh równe są różnicom między wartością: szerokości geograficznej, długości
geograficznej i wysokości w nowym układzie a wartością tej samej wielkości w
dotychczasowym układzie. Przez Δa, Δe2 , Δα
oznaczamy przyrosty dużej półosi, kwadratu pierwszego mimiśrodu i biegunowego
spłaszczenia elipsoidy.
Składowe Δx, Δy, Δz, wektora
ΔR można przedstawić jako różniczki zupełne względem φ, λ, h, a,
e2 . Wtedy otrzymujemy następujące zależności[3]:
![]()
![]()
![]()
Pochodne cząstkowe mają postać:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
gdzie:
φ, λ, h – współrzędne pozycji w
dotychczasowym układzie odniesienia
N – promień krzywizny pierwszego wertykału
![]()
M – promień krzywizny południka:
![]()
a – duża półoś elipsoidy dotychczasowego odniesienia.
Przyrost kwadratu pierwszego mimośrodu
(Δe2) można wyrazić za pomocą parametru α
charakteryzującego jej biegunowe spłaszczenie:
Z zależności:
e2 = 2α – α2
różniczka de2 jest równa:
de2 = 2b/a
tym samym
otrzymujemy:
![]()
uwzględniając poniższe założenie:
![]()
![]()
po odpowiednich przekształceniach powyższych
równań otrzymamy zależności określające szukane wartości poprawek Δφ,
Δλ, Δh, przy czym wartości poprawek dotyczących zarówno
szerokości jak i długości geograficznej wyrażone są w sekundach, a wysokości w
metrach:

![]()
![]()
gdzie:
r – wartość radiana wyrażona w sekundach, równa
206264,806
Do celów nawigacyjnych można stosować skróconą postać
wzorów Mołodieńskiego:
![]()
![]()
![]()
W powyższych wzorach przy przeliczaniu
współrzędnych z układu lokalnego do geocentrycznego, wszystkie przyrosty
(Δα, Δa, itp.) oznaczają różnice, które powstają w wyniku
odejmowania wartości parametrów: elipsoidy lokalnej od elipsoidy WGS, zatem
elipsoidy globalnej.
Pozostałe wartości to:
a - większe półosie elipsoidy lokalnej
b - mniejsza półoś elipsoidy lokalnej
α - spłaszczenie elipsoidy lokalnej
φ, λ, h – współrzędne geograficzne elipsoidy
lokalnej
b/a = 1 - α
e2 = 2α – α2
M, N – promienie krzywizny południka i pierwszego
wertykału
Podczas przeliczania współrzędnych z układu
geocentrycznego do układu lokalnego obowiązuje odwrotna zasada do wyżej
przedstawionej.
Metoda
oparta na wzorach Mołodieńskiego umożliwia przeliczanie współrzędnych z jednego
układu odniesienia do drugiego z dokładnością 0,03” w wypadku współrzędnych
geograficznych (φ, λ) oraz 0,5 m w przypadku wysokości h.
Podsumowanie
Transformacja współrzędnych jest jednym z zadań obliczeniowych często występujących w praktyce geodezyjnej. Polega ona na przeliczeniu współrzędnych z jednego układu na inny (najczęściej z pierwotnego na wtórny). Warunkiem przeprowadzenia poprawnej transformacji jest znajomość relacji zachodzących między współrzędnymi punktów wyrażonych w rozpatrywanych układach. Formuła (wzory) matematyczna przedstawiająca związki między współrzędnymi nazywana jest równaniem transformacyjnym. Istnieje opracowanych wiele modeli transformacji opisanych w literaturze geodezyjnej (także dostępne są specjalistyczne programy komputerowe) m.in.:
- model Bursy-Wolfa
- model Mołodienskiego
- model Mołodienskiego-Badekasa
-
model
Veisa
-
model
Wellsa-Vanicka
- model Krakiwskiego-Thomsona
Oczywistym jest, iż określona pozycja w zależności od stosowanego układu odniesienia, będzie opisana różnymi (innymi) współrzędnymi. Nawigator musi mieć pełną świadomość istnienia tego faktu. Różnice pozycji w przypadku zaniechania przez nawigatora przeliczenia współrzędnych (lub też nieuwzględnienia poprawek) mogą być znaczne i wpłynąć na bezpieczeństwo nawigacji (wg Notices to Mariners:„MAY BE SIGNIFICANT TO NAVIGATION”!)